Robot lặn “tự lên kế hoạch thí nghiệm”
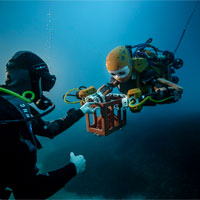
Các nhà khoa học Mỹ đang sử dụng một thiết bị lặn có khả năng “tự thiết lập các thí nghiệm” dưới đáy biển. Gulper AUV được lập trình để tìm kiếm thông tin mà các nhà khoa học muốn và tự lên lộ trình cho mình, tránh các dòng nước và chướng ngại nguy hiểm.

Thiết bị lặn ra đi, trở về và các dữ liệu được tải xuống - Ảnh: BBC
Tại hội nghị khoa học đại dương ở Portland, nhóm nghiên cứu đã giải thích làm thế nào để “huấn luyện” robot tự biết mang kết quả nghiên cứu tốt nhất lên mặt nước. Thom Maughan - thuộc Viện Nghiên cứu Monterey Bay Aquarium (MBARI) ở California, một trong các kỹ sư của dự án - cho biết Gulper AUV sử dụng phần mềm “T rex”, giống như phần mềm xe tự hành trên sao Hỏa của NASA để tránh các chướng ngại trên bề mặt hành tinh đỏ này.
Khác biệt chính giữa hai phần mềm này là đối với xe tự hành trên sao Hỏa, phần mềm hoạt động tại trung tâm kiểm soát ở Trái đất. Còn với thiết bị lặn, phần mềm hoạt động trên chính thiết bị. “Bạn có thể nói với nó những gì nó phải làm trước khi đưa nó xuống nước" - tiến sĩ Maughan nói - Chúng tôi nói với nó: “Đây là các nhiệm vụ chúng tôi muốn bạn thực hiện”, rồi nó xuất phát và đánh giá những gì đang xảy ra dưới đại dương, tự quyết định sẽ trải qua một đoạn đường dài cỡ nào để thu thập dữ liệu chúng tôi muốn”. Các nhà nghiên cứu tại MBARI sử dụng Gulper AUV để kiểm soát hoa rong biển có hại.
Kim Fulton - Bennett thuộc MBARI giải thích: ”Trước đây, cứ vài tuần chúng tôi thường đi trên tàu suốt một ngày để dùng tay thực hiện các đo lường. Nay chúng tôi chỉ đưa Gulper AUV ra phía ngoài cảng và cho nó lặn xuống rồi tự di chuyển. Khoảng 24 giờ sau nó trở về, chúng tôi kéo lên boong và tải các dữ liệu xuống”.
Công nghệ
-

"Hóa zombie" vì ăn thịt nai nhiễm bệnh ở Mỹ
-

Thác nước "ẩn mình" cao nhất thế giới, lưu lượng bằng 25 sông Amazon, muốn xem tận mắt cũng khó
-

Chiêm ngưỡng bông hoa trăm năm mới nở
-

Điều gì đã xảy ra vào năm 1816, khi Trái đất chứng kiến một năm "không có mùa hè"?
-

Hướng mới tìm kiếm sự sống ngoài hành tinh
-

Phát triển thiết bị bay không người lái chạy bằng nhiên liệu hydro
Công nghệ mới
-

Triển khai dự án sản xuất điện bằng động cơ ánh sáng
-
Thiết bị tàng hình trong môi trường từ trường tĩnh
-
Đường hầm gió tốc độ hơn 40.000km/h của Trung Quốc đi vào hoạt động
-
Xăng máy bay chiết từ cây mía
-
Neutrino giúp giải thích phản vật chất?
-
Phát triển thành công vật liệu "không thể cắt" đầu tiên trên thế giới




Tiêu điểm
-
Nhà khoa học Trung Quốc chế tạo thành công tủ lạnh có nhiệt độ gần bằng độ 0 tuyệt đối
-
Máy tính lượng tử lạnh nhất thế giới này sẽ đánh bại Google
-
Súng Gauss được chế tạo bằng công nghệ in 3D
-
"Trí tuệ nhân tạo" AlphaGo là gì mà khiến con người thán phục?
-
Boston Dynamics công bố dòng robot Atlas mới, thực hiện được những động tác bất khả thi với con người
-
Nhà vệ sinh tương lai, bồn cầu sẽ biết... bắt bệnh
-
Robot đã tự biết lừa bóng, qua người, ghi bàn







-

Công nghệ mới
-

Phần mềm hữu ích
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Danh nhân thế giới
-

Khoa học vũ trụ
-

1001 bí ẩn
-

Ngày tận thế
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Lịch sử
-

Khoa học quân sự
-

Tại sao
-

Địa danh nổi tiếng
-

Bệnh và thông tin bệnh
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Virus Covid 19
-

Ứng dụng khoa học
-

Khoa học & Bạn đọc
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Góc hài hước
-

Video