-
 Bí ẩn 2 ngôi mộ bất khả xâm phạm trên đường băng quốc tế ít người biết đến
Bí ẩn 2 ngôi mộ bất khả xâm phạm trên đường băng quốc tế ít người biết đến Người ta nói rằng nếu bạn hạ cánh ngay sau khi Mặt Trời lặn, 2 người bí ẩn từ hai khoảnh đất lạ sẽ xuất hiện dọc theo phía Bắc của đường băng.
-
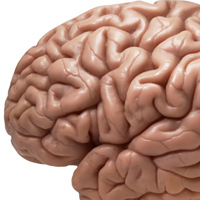 Những sự thật gây sốc về bộ não con người
Những sự thật gây sốc về bộ não con người Não là cơ quan phức tạp và bí ẩn nhất trong cơ thể con người. Các nhà khoa học đã có nhiều nghiên cứu về chúng nhưng bộ não vẫn còn nhiều điều bí ẩn với chúng ta.
-
 Cách trồng và chăm sóc dâu tây tại nhà cho trái chín đỏ mọng
Cách trồng và chăm sóc dâu tây tại nhà cho trái chín đỏ mọng Dâu tây là loại trái cây được nhiều người ưa chuộng. Với nhu cầu sử dụng các sản phẩm sạch như hiện nay thì cách trồng dâu tây tại nhà là rất cần thiết cho mỗi người.
-
 Những thực phẩm bổ dưỡng cho trí não
Những thực phẩm bổ dưỡng cho trí não Chúng ta sẽ già đi theo thời gian, và bộ não chúng ta cũng vậy. Tuy nhiên, ta có thể làm tăng năng lực của não bằng cách ăn những thức ăn đầy đủ và cân bằng trong khẩu phần.
-
 Nguyên nhân và cách đối phó khi trẻ ra nhiều mồ hôi tay, chân
Nguyên nhân và cách đối phó khi trẻ ra nhiều mồ hôi tay, chân Bệnh ra mồ hôi tay, chân là bệnh gặp ở nhiều người trong đó có cả trẻ nhỏ. Bệnh có vẻ không có gì là ghê gớm, thế nhưng nó lại dai dẳng, gây khó chịu cho người bệnh.
-
 Thuật thôi miên và những bí ẩn trong thế giới tiềm thức
Thuật thôi miên và những bí ẩn trong thế giới tiềm thức Nhiều người có những ý nghĩ kỳ quặc về thuật thôi miên. Chẳng hạn, họ cho rằng một người đã bị thôi miên rồi thì hoặc là không thể tỉnh lại được, hoặc là có thể bị sai khiến làm những việc không tốt.
-
 Kỹ thuật uốn cây cảnh tạo dáng nghệ thuật
Kỹ thuật uốn cây cảnh tạo dáng nghệ thuật Kỹ thuật uốn cành, tạo dáng, tạo thế cho cây cảnh là một bước không thể bỏ qua đối với người chơi cây cảnh. Tùy thuộc vào loại cây mà ta có thể thực hiện kỹ thuật uốn cành cho cây.
 Giới khoa học phát triển thành công tay robot điều khiển bằng não bộ Những người bận rộn hay kêu ca rằng, họ cần thêm một cánh tay nữa thì mới làm hết việc, nhưng giờ đây, điều đó có thể sắp thành hiện thực.
Giới khoa học phát triển thành công tay robot điều khiển bằng não bộ Những người bận rộn hay kêu ca rằng, họ cần thêm một cánh tay nữa thì mới làm hết việc, nhưng giờ đây, điều đó có thể sắp thành hiện thực. Sự khác nhau giữa những người dùng bán cầu não trái và phải Bộ não của chúng ta được chia làm hai bán cầu, mỗi bên thực hiện các chức năng khác nhau. Và việc sử dụng nhiều bán cầu não phải hay trái nhiều hơn sẽ quyết định những kỹ năng và sở thích của chúng ta.
Sự khác nhau giữa những người dùng bán cầu não trái và phải Bộ não của chúng ta được chia làm hai bán cầu, mỗi bên thực hiện các chức năng khác nhau. Và việc sử dụng nhiều bán cầu não phải hay trái nhiều hơn sẽ quyết định những kỹ năng và sở thích của chúng ta. Ngôi "làng bò" kỳ lạ, không ai biết đi đứng, chỉ có thể bò bằng 4 chi Người dân sống tại ngôi làng này không ai có thể đi đứng bình thường, họ chỉ có thể bò bằng 4 chi và ngay cả đứa trẻ con cũng vậy.
Ngôi "làng bò" kỳ lạ, không ai biết đi đứng, chỉ có thể bò bằng 4 chi Người dân sống tại ngôi làng này không ai có thể đi đứng bình thường, họ chỉ có thể bò bằng 4 chi và ngay cả đứa trẻ con cũng vậy. Khoa học quân sự
Khoa học quân sự  Tại sao
Tại sao  Địa danh nổi tiếng
Địa danh nổi tiếng  Bệnh và thông tin bệnh
Bệnh và thông tin bệnh  Virus Covid 19
Virus Covid 19