Hệ thống đẩy của robot
-
 Robot này có thể bơi mà không cần động cơ và pin Theo Technology, robot sử dụng cơ chế phản ứng của cơ thể với nhiệt độ để tạo ra lực đẩy và di chuyển trong nước. Nhờ đó mà robot không cần sử dụng tới bất cứ động cơ hay nguồn điện nào.
Robot này có thể bơi mà không cần động cơ và pin Theo Technology, robot sử dụng cơ chế phản ứng của cơ thể với nhiệt độ để tạo ra lực đẩy và di chuyển trong nước. Nhờ đó mà robot không cần sử dụng tới bất cứ động cơ hay nguồn điện nào.
-
 5 lí do để uống nước chanh mật ong vào sáng sớm Nước ấm, mật ong và chanh là hỗn hợp thức uống tuyệt vời. Nngoài việc làm dịu các cơn đau dạ dày và đem lại sự tươi mới cho làn da, thức uống này còn có nhiều công dụng khác mà bạn chưa biết đến.
5 lí do để uống nước chanh mật ong vào sáng sớm Nước ấm, mật ong và chanh là hỗn hợp thức uống tuyệt vời. Nngoài việc làm dịu các cơn đau dạ dày và đem lại sự tươi mới cho làn da, thức uống này còn có nhiều công dụng khác mà bạn chưa biết đến. -
 Những phong tục tình dục kỳ lạ trên thế giới Nhiều phong tục tình dục kỳ lạ có từ lâu đời vẫn đang diễn ra ở nhiều dân tộc trên thế giới cho dù cánh cửa nối họ với thế giới hiện đại đã mở ra rất nhiều.
Những phong tục tình dục kỳ lạ trên thế giới Nhiều phong tục tình dục kỳ lạ có từ lâu đời vẫn đang diễn ra ở nhiều dân tộc trên thế giới cho dù cánh cửa nối họ với thế giới hiện đại đã mở ra rất nhiều.
-
 Vì sao người Do Thái thông minh nhất thế giới? Từ ngàn xưa, người Do Thái đã xem tri thức là loại vốn đặc biệt vì có thể sinh ra vốn và của cải, lại không bị cướp đoạt được.
Vì sao người Do Thái thông minh nhất thế giới? Từ ngàn xưa, người Do Thái đã xem tri thức là loại vốn đặc biệt vì có thể sinh ra vốn và của cải, lại không bị cướp đoạt được. -
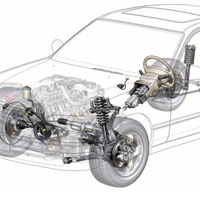 Nguyên lý hoạt động của hệ thống lái Khi bạn xoay vành tay lái đi, đương nhiên chiếc xe của bạn sẽ chuyển hướng theo phía mà bạn muốn. Thế nhưng quan hệ “nhân quả” của chúng như thế nào? Chắc chắn sẽ có nhiều điều thú vị khi bạn tìm hiểu về nguyên lý l&a
Nguyên lý hoạt động của hệ thống lái Khi bạn xoay vành tay lái đi, đương nhiên chiếc xe của bạn sẽ chuyển hướng theo phía mà bạn muốn. Thế nhưng quan hệ “nhân quả” của chúng như thế nào? Chắc chắn sẽ có nhiều điều thú vị khi bạn tìm hiểu về nguyên lý l&a -
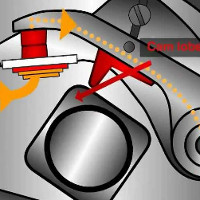 Nguyên lý hoạt động của hệ thống đánh lửa trên ôtô Động cơ đốt trong là một “cỗ máy” có nhiều hệ thống phụ trợ như hệ thống nhiên liệu, hệ thống làm mát, hệ thống phân phối khí, hệ thống tăng áp...
Nguyên lý hoạt động của hệ thống đánh lửa trên ôtô Động cơ đốt trong là một “cỗ máy” có nhiều hệ thống phụ trợ như hệ thống nhiên liệu, hệ thống làm mát, hệ thống phân phối khí, hệ thống tăng áp... -
 Động cơ ô tô hoạt động như thế nào? Bạn đã bao giờ mở nắp ca-pô chiếc ôtô của mình và tự hỏi cái gì xảy ra trong động cơ của nó chưa? Có thể bạn không hiếu kỳ và không muốn biết tường tận điều đó. Thế nhưng khi mua một chiếc xe mới chắc chắn bạn cũng cần phải biết 3.0 V6 hay 2.4 G... nghĩa là gì? “Dual overhead cams” hay “tuned port fuel injection” là thế nào?... Để trả lời cho các câu hỏi trên, chúng ta hãy tìm hiểu về động cơ của ôtô.
Động cơ ô tô hoạt động như thế nào? Bạn đã bao giờ mở nắp ca-pô chiếc ôtô của mình và tự hỏi cái gì xảy ra trong động cơ của nó chưa? Có thể bạn không hiếu kỳ và không muốn biết tường tận điều đó. Thế nhưng khi mua một chiếc xe mới chắc chắn bạn cũng cần phải biết 3.0 V6 hay 2.4 G... nghĩa là gì? “Dual overhead cams” hay “tuned port fuel injection” là thế nào?... Để trả lời cho các câu hỏi trên, chúng ta hãy tìm hiểu về động cơ của ôtô. -
 Đập Tam Hiệp Trung Quốc: 13 sự thật về con đập khổng lồ gây tranh cãi đã làm chậm quá trình quay của Trái Đất Đập Tam Hiệp Trung Quốc (tiếng Anh Three Gorges Dam) là một trong những dự án đầy tham vọng và gây tranh cãi trên hành tinh. Nhưng bạn biết bao nhiêu về đập Tam Hiệp?
Đập Tam Hiệp Trung Quốc: 13 sự thật về con đập khổng lồ gây tranh cãi đã làm chậm quá trình quay của Trái Đất Đập Tam Hiệp Trung Quốc (tiếng Anh Three Gorges Dam) là một trong những dự án đầy tham vọng và gây tranh cãi trên hành tinh. Nhưng bạn biết bao nhiêu về đập Tam Hiệp? -
 Nhà tiên tri Vanga và những dự đoán về các thảm họa Không có nhiều người tin vào tiên đoán của những nhà tiên tri. Tuy nhiên, người ta không thể làm ngơ khi những tiên đoán đó thành hiện thực tới 70%. Hãy cùng xem các tiên tri của Vanga qua bài viết dưới đây
Nhà tiên tri Vanga và những dự đoán về các thảm họa Không có nhiều người tin vào tiên đoán của những nhà tiên tri. Tuy nhiên, người ta không thể làm ngơ khi những tiên đoán đó thành hiện thực tới 70%. Hãy cùng xem các tiên tri của Vanga qua bài viết dưới đây -
 Vì sao phi tần tuẫn táng cùng Tần Thủy Hoàng đều không khép chân sau khi bị chôn sống? Tục tuẫn táng là một trong những phong tục tàn khốc nhất thời xưa, bất kỳ người phụ nữ nào bị tuẫn táng cũng sẽ cực kỳ đáng thương.
Vì sao phi tần tuẫn táng cùng Tần Thủy Hoàng đều không khép chân sau khi bị chôn sống? Tục tuẫn táng là một trong những phong tục tàn khốc nhất thời xưa, bất kỳ người phụ nữ nào bị tuẫn táng cũng sẽ cực kỳ đáng thương.
 Khoa học quân sự
Khoa học quân sự  Tại sao
Tại sao  Địa danh nổi tiếng
Địa danh nổi tiếng  Bệnh và thông tin bệnh
Bệnh và thông tin bệnh  Virus Covid 19
Virus Covid 19