Sinh viên Việt Nam 'ngán' đề thi Robocon 2009
Hạn chế đối kháng trực tiếp và đòi hỏi giải các bài toán kỹ thuật khó, đề thi Robocon năm 2009 khiến sinh viên Việt Nam bộc lộ điểm yếu.
Đề thi Robocon năm 2009 lấy cảm hứng từ phong tục rước kiệu (Kago) của Nhật Bản. Theo đó, một cặp robot điều khiển bằng tay sẽ "khênh" robot tự động qua một số chướng ngại vật đến đích là nơi đặt trống. Tại đó, robot trên kiệu sẽ được thả xuống, tiến gần trống và gõ ba tiếng báo hiệu chiến thắng.
Hạn chế chiến thắng bằng... "mánh"
Tuy nhiên, so với đề thi những năm trước, việc chia sân thi đấu thành hai phần riêng biệt đã hạn chế sự can thiệp lẫn nhau giữa các đội. Vô hình trung, đề thi mới gạt bỏ những ý nghĩ sử dụng robot cản phá trong cuộc thi, thế mạnh của các đội tuyển robocon của Việt Nam những năm thi đấu trước đây.
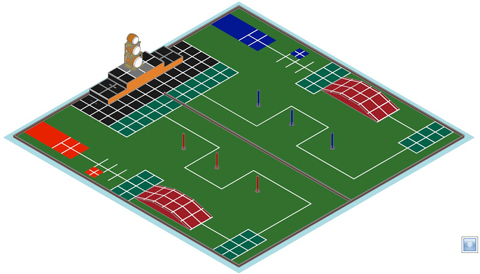 |
Sân thi đấu của Robocon 2009, từ điểm xuất phát (màu xanh và đỏ) robot của mỗi đội phải vượt dốc, di chuyển qua các cọc tiêu và thả robot tự động đánh trống tại đích. |
Đỗ Duy Phương, thành viên đội VJC, ĐH Công nghiệp Hà Nội cho biết: "Sàn thi đấu được ngăn đôi bởi một tấm gỗ nhỏ do đó, hai bên khó có thể can thiệp được lẫn nhau, cùng lắm là ở vị trí đánh trống với điều kiện cả hai robot cùng đến đích một lúc".
"Điều này sẽ hướng các đội chơi tìm kiếm chiến thắng bằng trình độ kỹ thuật hơn là những chiến thuật", Thầy Trần Xuân Thủy, chỉ đạo viên của Học viện Phòng quân - Không quân nhận xét.
Phải đầu tư chất xám cao
Nhận xét về đề thi năm 2009, tiến sĩ Phan Xuân Minh, Bộ môn Điều khiển Tự động, ĐH Bách Khoa Hà Nội cho rằng đề thi năm nay gây khó hơn cho sinh viên. "Kết quả vòng thi thử ở ĐH Bách Khoa HN năm nay không có đội nào giành điểm tuyệt đối, trong khi mọi năm ít nhất phải có từ hai đến ba đội", tiến sĩ Minh nói.
 |
Robot tự động rất dễ ngã ở những khúc cua như thế này. Ảnh: Tuấn Linh |
Tiến sĩ Minh nhận xét thêm, đề thi Robocon 2009 đòi hỏi các đội phải kết hợp uyển chuyển giữa robot tự động và robot điều khiển bằng tay và giải tốt bài toán thiết lập chế độ cân bằng động cho robot. Tức là, khi các robot điều khiển "cõng" robot tự động phải đảm bảo robot tự động không bị "lăn" khỏi "kiệu". "Cái khó của đề thi năm nay đòi hỏi sinh viên phải tính toán kết cấu cơ khí nhiều hơn và đây chính là điểm yếu của sinh viên Việt Nam", tiến sĩ Minh nhận định.
 |
Robot điều khiển phải "cõng" robot đánh trống (robot tự động) vượt qua chướng ngại vật. Nếu không đảm bảo sự cân bằng, robot đánh trống sẽ rơi khỏi kiệu và phải xuất phát lại. Ảnh: Tuấn Linh |
Ngoài yếu tố cơ khí, tiến sĩ Minh cho rằng, để đảm bảo chiến thắng các đội chơi cần chú ý tới việc điều chế độ rộng xung điều khiển (PWM) cho các động cơ di chuyển của robot, tránh tình trạng "giật cục" mỗi lần người chơi ra một lệnh di chuyển.
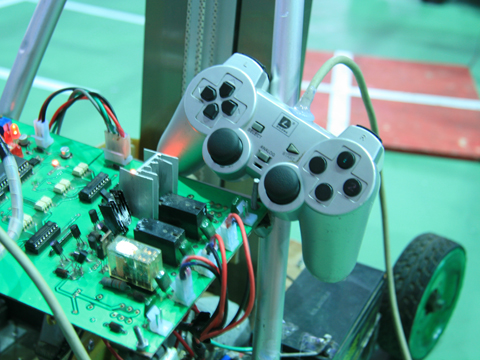 |
Không đầu tư giải các bài toán kỹ thuật nên việc điều khiển robot bằng tay trông chờ vào sự linh hoạt, khéo léo của người chơi. Ảnh: Tuấn Linh |
Tham gia thử sân thi đấu, tại Nhà thi đấu Hồ Tây, Hà Nội, Nguyễn Văn Tuấn, đội trưởng đội Robocon trường Công nghiệp Sao Đỏ, Hải Dương cho biết, việc điều khiển robot gần như phải dựa vào... sự khéo léo của đôi tay. "Tuy biết là có thể nâng cao khả năng tự cân bằng và di chuyển êm dịu của robot bằng kỹ thuật điều khiển mềm nhưng vì thời gian gấp và... khó quá nên đội quyết định vẫn dùng phương án điều khiển "cứng" như mọi năm, chấp nhận hiện tượng giật cục",Tuấn cho biết.
Gặp đề thi khó nhưng Tuấn không tỏ ý "ngán" các đội tuyển khác. Qua quan sát robot của các đội tuyển đến thử sân, Tuấn nhận xét: Hầu hết các robot khênh kiệu (có vai trò quan trọng nhất trong di chuyển) đều na ná nhau về cơ cấu điều khiển, sự khác biệt, có chăng nằm ở cơ cấu đánh trống của các robot tự động.
Sự kiện
-

Tiểu hành tinh 610m lao đến Trái đất, tối nay có thể nhìn thấy
-

Biến đổi khí hậu đảo ngược tiến bộ y học
-

"Sự kiện tuyệt chủng hàng loạt lần thứ sáu" đã bắt đầu, tồi tệ hơn dự báo
-

Cựu kỹ sư khu vực 51 - Bob Lazar tiết lộ nguyên lý bay của đĩa bay!
-

Túi nhỏ trên quần jean dùng để đựng gì?
-

Trái đất nóng lên khiến nhiều động vật biển chết hàng loạt vì... lạnh




Tiêu điểm
-

Thế giới sẽ ra sao trong 30 năm nữa?
-
Người cao nhất và người thấp nhất thế giới gặp nhau
-
7 hành vi xấu trong nghiên cứu khoa học
-
Những công nghệ sẽ xuất hiện trong tương lai
-
Sóng hấp dẫn đưa con người đến với một hiện tượng chưa từng có trong lịch sử thiên văn
-
Việt Nam ký kết hợp tác bảo vệ động vật với WSAP
-
20 triệu đô cho một vệ tinh nhỏ, liệu có quá đắt?







-

Công nghệ mới
-

Phần mềm hữu ích
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Danh nhân thế giới
-

Khoa học vũ trụ
-

1001 bí ẩn
-

Ngày tận thế
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Lịch sử
-

Khoa học quân sự
-

Tại sao
-

Địa danh nổi tiếng
-

Bệnh và thông tin bệnh
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Virus Covid 19
-

Ứng dụng khoa học
-

Khoa học & Bạn đọc
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Góc hài hước
-

Video