-
 Cuộc đời của Stephen Hawking qua ảnh
Cuộc đời của Stephen Hawking qua ảnh Stephen William Hawking là một nhà vật lý lý thuyết, vũ trụ học, tác giả viết sách khoa học thường thức người Anh.
-
 12 phát minh "không tưởng" của Nikola Tesla
12 phát minh "không tưởng" của Nikola Tesla "Bác học điên" Nikola Tesla đã có những ý tưởng khó tin về khoa học như: điều khiển thời tiết, khai thác năng lượng vũ trụ, điện không dây...
-
 10 bí ẩn khiến các nhà khoa học chào thua
10 bí ẩn khiến các nhà khoa học chào thua Khoa học phát triển, đạt được nhiều thành tựu không ngờ nhưng tới giờ, các nhà khoa học vẫn chịu thua nhiều hiện tượng bí ẩn.
-
 Làm thế nào máy bay có thể bay trên bầu trời?
Làm thế nào máy bay có thể bay trên bầu trời? Không phải động cơ, mà là luồng khí trên cánh máy bay, vành thân và bánh đỗ là thủ phạm chính khiến máy bay trở nên ồn ào như vậy. Chúng tạo ra âm thanh u u rền rĩ k&
-
 Acsimet - nhà bác học vĩ đại của Hy Lạp cổ
Acsimet - nhà bác học vĩ đại của Hy Lạp cổ Archimedes của Syracuse là một nhà toán học, nhà vật lý, kỹ sư, nhà phát minh, và một nhà thiên văn học người Hy Lạp. Dù ít chi tiết về cuộc đời ông được biết, ông được coi là một trong những nhà khoa học hàng đầu của thời kỳ cổ đại.
-
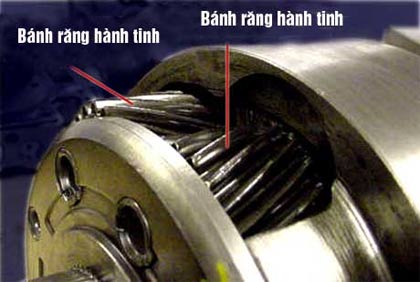 Nguyên lý hoạt động của hộp số tự động
Nguyên lý hoạt động của hộp số tự động Nếu bạn đã từng điều khiển một chiếc ôtô số tự động, chắc chắn bạn sẽ nhận ra hai điều khác biệt rõ ràng giữa một chiếc xe số tự động và chiếc xe sử dụng số cơ khí gài bằng tay.
-
 Ngày 29 tháng 7 tới đây mới thực sự là ngày tận thế của loài người?
Ngày 29 tháng 7 tới đây mới thực sự là ngày tận thế của loài người? Một tổ chức tiên tri dự báo vào ngày 29/7, Trái Đất sẽ trải qua một trận động đất toàn cầu dữ dội, đồng thời các vì sao cũng sẽ liên tục rơi xuống hành tinh xanh.
 Bí Ẩn Về Loài Chim Báo Hiệu Cái Chết Cú lợn là loài chim rất thông minh, đáng yêu. Tuy nhiên, ở Việt Nam, chúng bị coi là quỷ dữ, khi người ta tin rằng, chúng là điềm báo cho một cái chết.
Bí Ẩn Về Loài Chim Báo Hiệu Cái Chết Cú lợn là loài chim rất thông minh, đáng yêu. Tuy nhiên, ở Việt Nam, chúng bị coi là quỷ dữ, khi người ta tin rằng, chúng là điềm báo cho một cái chết. 23 hiện tượng thiên nhiên kỳ bí thách thức khoa học Thiên nhiên luôn ẩn chứa các bí ẩn thách thức các nhà khoa học. Mặc dù hiện nay khoa học đã rất phát triển những các nhà khoa học vẫn đang "điên đầu" để giải thích các hiện tượng kỳ bí mà đôi lúc còn được gọi là "phép màu".
23 hiện tượng thiên nhiên kỳ bí thách thức khoa học Thiên nhiên luôn ẩn chứa các bí ẩn thách thức các nhà khoa học. Mặc dù hiện nay khoa học đã rất phát triển những các nhà khoa học vẫn đang "điên đầu" để giải thích các hiện tượng kỳ bí mà đôi lúc còn được gọi là "phép màu". Những bí ẩn khoa học mới được giải đáp Khoa học cũng giống như một trò chơi ô số bí ẩn, và con người luôn là những người chơi hiếu kì nhất.
Những bí ẩn khoa học mới được giải đáp Khoa học cũng giống như một trò chơi ô số bí ẩn, và con người luôn là những người chơi hiếu kì nhất. Khoa học quân sự
Khoa học quân sự  Tại sao
Tại sao  Địa danh nổi tiếng
Địa danh nổi tiếng