Robot côn trùng
Các nhà khoa học Đức đã chế tạo một loại robot có 6 chân để nghiên cứu những cử động tinh tế của côn trùng.
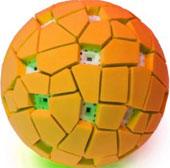
Theo trang Discovery, mẫu robot 6 chân lấy cảm hứng từ côn trùng do các nhà nghiên cứu thuộc Đại học Bielefeld (Đức) thiết kế và được đặt tên là Hector. Để cho ra đời Hector, nhóm nghiên cứu đã sử dụng một loại ổ khớp điều khiển đàn hồi mới, mô phỏng cử động của cơ.

Mỗi ổ khớp được trang bị các bộ phận cảm biến, điều khiển điện tử, một bộ xử lý chuyên dụng và một khớp nối cảm ứng - tất cả đều được điều khiển bởi các thuật toán lấy cảm hứng từ sinh học. Điều này cho phép Hector phản ứng thông qua việc cong, oằn trong lúc va chạm hoặc tương tác với con người.
Bộ khung xương ngoài của robot côn trùng được làm bằng chất dẻo gia cố bằng sợi carbon (CFRP) nhẹ nhưng độ bền cao và chỉ chiếm khoảng 13% tổng trọng lượng 12kg của robot. Tuy nhiên, robot cao gần 1 mét này vẫn có khả năng chở nặng gấp 2 lần trọng lượng cơ thể của nó. Một thử nghiệm cho thấy, robot có thể mang một tải trọng 30kg với việc bị biến dạng không đầy 0,3cm.
Thiết kế cơ thể dạng nắp dịch chuyển cho phép các nhà khoa học dễ dàng di đời và lắp đặt thiết bị cảm biến đặc biệt cho những nghiên cứu khác nhau. Ví dụ, một máy ảnh đa hướng cho hoạt động cảm biến từ tầm gần tới xa có thể dễ dàng đổi chỗ với một ăng-ten xúc giác, để phù hợp hơn với việc khám phá môi trường xung quanh tức thì.
Chương trình kiểm soát của Hector hoạt động trên cùng nguyên tắc phản ứng thông minh trước các kích thích được phát hiện trong não côn trùng. Một bộ phận đặc biệt xử lý các thông tin thu được và kết nối chuyển động của robot với hệ thống điều khiển.
Những người sáng chế ra Hector dự định sẽ phát triển thêm cho robot này khả năng học hỏi và lập kế hoạch. Điều đó sẽ cho phép nó có thể điều hướng trong những vùng lãnh thổ không quen thuộc và chủ động thực hiện các nhiệm vụ thăm dò.
Công nghệ
-
Những ngọn núi hình kim tự tháp của Trung Quốc làm dấy lên vô số thuyết âm mưu!
-

Lần đầu tiên chụp được hình ảnh X quang của một nguyên tử
-

Những lợi ích thú vị của quả xoài
-

Bí ẩn điện áp 110V: Tiết lộ lý do Mỹ nhất quyết sử dụng điện áp này!
-

Thứ trong ảnh không phải ngôi sao, mà là "con thú" khiến cả vũ trụ khiếp sợ
-

Chim tu hú - Bà mẹ bạc tình và đứa con sát thủ





Tiêu điểm
-

Máy bay cánh liền thân có thể thay thế máy bay Boeing
-
Mắt kính phiên dịch mọi ngôn ngữ khác nhau của Google
-
Trí tuệ nhân tạo giúp nhận diện diễn viên phim 18+
-
Việt Nam chế tạo sơn hấp thụ sóng radar
-
Đường hầm gió tốc độ 37.000km/h của Trung Quốc dự kiến sẽ sẵn sàng vào năm tới
-
Vật liệu nhẹ nhất thế giới, nhẹ hơn cả không khí nay đã có thể in 3D
-
Nuôi khủng long cảnh trong nhà







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video