lập trình robot
-
 Robot nhún nhảy, đá bóng theo khả năng lập trình của trẻ em Robot Marty có thể đi, nhảy, đá bóng và rất dễ dàng để trẻ nhỏ tự lập trình chuyển động cho nó.
Robot nhún nhảy, đá bóng theo khả năng lập trình của trẻ em Robot Marty có thể đi, nhảy, đá bóng và rất dễ dàng để trẻ nhỏ tự lập trình chuyển động cho nó.
-
 Tài năng trẻ và những con robot Tại Sochi vừa tiến hành tổng kết cuộc thi chế tạo robot toàn thế giới (World Robotics Olympiad – WRO), diễn ra ở đây trong mười ngày cuối cùng của tháng 11.
Tài năng trẻ và những con robot Tại Sochi vừa tiến hành tổng kết cuộc thi chế tạo robot toàn thế giới (World Robotics Olympiad – WRO), diễn ra ở đây trong mười ngày cuối cùng của tháng 11. -
 Đập Tam Hiệp Trung Quốc: 13 sự thật về con đập khổng lồ gây tranh cãi đã làm chậm quá trình quay của Trái Đất Đập Tam Hiệp Trung Quốc (tiếng Anh Three Gorges Dam) là một trong những dự án đầy tham vọng và gây tranh cãi trên hành tinh. Nhưng bạn biết bao nhiêu về đập Tam Hiệp?
Đập Tam Hiệp Trung Quốc: 13 sự thật về con đập khổng lồ gây tranh cãi đã làm chậm quá trình quay của Trái Đất Đập Tam Hiệp Trung Quốc (tiếng Anh Three Gorges Dam) là một trong những dự án đầy tham vọng và gây tranh cãi trên hành tinh. Nhưng bạn biết bao nhiêu về đập Tam Hiệp?
-
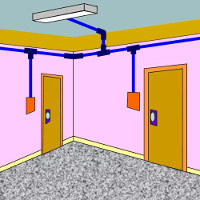 Kỹ thuật lắp đặt điện trong nhà, ngoài trời và đường dây cho thuỷ điện nhỏ Để hạn chế tai nạn điện mọi người cần chú ý tuân thủ theo những quy định cơ bản về kỹ thuật lắp điện sinh hoạt trong nhà và một số biện pháp đảm bảo an toàn khi vận hành, sử dụng điện.
Kỹ thuật lắp đặt điện trong nhà, ngoài trời và đường dây cho thuỷ điện nhỏ Để hạn chế tai nạn điện mọi người cần chú ý tuân thủ theo những quy định cơ bản về kỹ thuật lắp điện sinh hoạt trong nhà và một số biện pháp đảm bảo an toàn khi vận hành, sử dụng điện. -
 Đã có bằng chứng cho thấy vũ trụ này là giả lập, Elon Musk đã đúng Các nhà vật lý học nói với chúng ta rằng họ đang nắm trong tay bằng chứng vũ trụ mà ta vẫn biết là một chương trình giả lập trên máy tính.
Đã có bằng chứng cho thấy vũ trụ này là giả lập, Elon Musk đã đúng Các nhà vật lý học nói với chúng ta rằng họ đang nắm trong tay bằng chứng vũ trụ mà ta vẫn biết là một chương trình giả lập trên máy tính. -
 Có bao nhiêu quốc gia trên thế giới? Một quốc gia là một chủ thể của luật quốc tế (một quốc gia có chủ quyền hoàn toàn) phải đáp ứng được những tiêu chuẩn sau.
Có bao nhiêu quốc gia trên thế giới? Một quốc gia là một chủ thể của luật quốc tế (một quốc gia có chủ quyền hoàn toàn) phải đáp ứng được những tiêu chuẩn sau. -
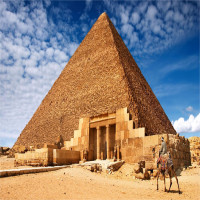 Kim Tự Tháp - Công trình kiến trúc bí ẩn nhất của loài người Nếu như phải chọn ra một công trình kiến trúc vĩ đại nhất, bí ẩn nhất của con người, chắc chắn Kim Tự Tháp sẽ là một ứng viên cực kỳ sáng giá.
Kim Tự Tháp - Công trình kiến trúc bí ẩn nhất của loài người Nếu như phải chọn ra một công trình kiến trúc vĩ đại nhất, bí ẩn nhất của con người, chắc chắn Kim Tự Tháp sẽ là một ứng viên cực kỳ sáng giá. -
 Bão là gì? Bão hình thành như thế nào và vì sao có bão? Bão hình thành như thế nào? Vì sao lại có bão? Bài viết dưới đây sẽ giải đáp cho bạn biết đó.
Bão là gì? Bão hình thành như thế nào và vì sao có bão? Bão hình thành như thế nào? Vì sao lại có bão? Bài viết dưới đây sẽ giải đáp cho bạn biết đó. -
 SK3500D: Cỗ máy phá hủy công trình xây dựng lớn nhất thế giới, cao 65m SK3500D với chiều cao lên đến hơn 65m là cỗ máy phá hủy công trình xây dựng lớn nhất thế giới, được sách kỷ lục thế giới Guinness công nhận.
SK3500D: Cỗ máy phá hủy công trình xây dựng lớn nhất thế giới, cao 65m SK3500D với chiều cao lên đến hơn 65m là cỗ máy phá hủy công trình xây dựng lớn nhất thế giới, được sách kỷ lục thế giới Guinness công nhận. -
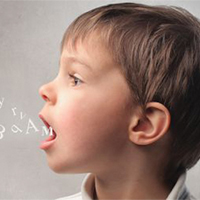 Tật nói lắp và cách khắc phục Tật nói lắp là hiện tượng loạn thần kinh chức năng của ngôn ngữ, thường thấy nhất ở trẻ từ 2 đến 6 tuổi nhất là các bé trai. Tuy không phải là bệnh nhưng nói lắp gây ra nhiều phiền phức cho trẻ , tạo áp lực cho trẻ khi nói chuyện. Tật nói lắp được phát hiện và điều trị sớm sẽ mang lại hiệu quả cao.
Tật nói lắp và cách khắc phục Tật nói lắp là hiện tượng loạn thần kinh chức năng của ngôn ngữ, thường thấy nhất ở trẻ từ 2 đến 6 tuổi nhất là các bé trai. Tuy không phải là bệnh nhưng nói lắp gây ra nhiều phiền phức cho trẻ , tạo áp lực cho trẻ khi nói chuyện. Tật nói lắp được phát hiện và điều trị sớm sẽ mang lại hiệu quả cao.
 Khoa học quân sự
Khoa học quân sự  Tại sao
Tại sao  Địa danh nổi tiếng
Địa danh nổi tiếng