Robot mềm giống bạch tuộc, di chuyển trong môi trường hẹp
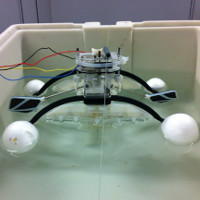
Mới đây, phòng thí nghiệm nhân tạo và khoa học máy tính (CSAIL) thuộc MIT đã giới thiệu một con robot mềm có thiết kế giống như vòi bạch tuộc với khả năng trườn bò linh hoạt trong các môi trường hẹp như đường ống mà không cần người điều khiển. Con robot này sẽ được CSAIL trình diễn tại hội nghị các hệ thống và robot thông minh quốc tế (IROS) diễn ra trong tuần này.
Robot được chế tạo bằng chất liệu cao su silicon trong khuôn đúc được in 3D và là robot mới nhất thuộc dự án nghiên cứu robot mềm do Daniel Rus - giám đốc CSAIL lãnh đạo. Mục tiêu của dự án là mở rộng lĩnh vực robot mềm bởi chúng nắm giữ tiềm năng an toàn hơn, độ đàn hồi cao hơn và hiệu quả hơn hơn so với robot thân cứng trong một số công việc nhất định.

Độ linh hoạt của robot thân cứng truyền thống bị giới hạn ở các điểm nối hay các khớp. Chúng không thể di chuyển trong các không gian hạn chế và cần phải được lập trình cực kỳ chính xác để tránh va chạm với địa hình. Ngược lại, cấu trúc có thể biến dạng của robot mềm sẽ giúp chúng dễ dàng chen vào các điểm hẹp và chuyển hướng nhanh hơn. Ngoài ra, robot mềm cũng có độ đàn hồi cao hơn để chống va chạm và thậm chí có thể khai thác va chạm để thu thập thông tin về môi trường xung quanh.
Trở lại với robot bạch tuộc của CSAIL, nhóm nghiên cứu dẫn đầu bởi nghiên cứu sinh tiến sĩ Andrew Marchese, Robert Katzschmann và giám đốc Daniel Rus đã phát triển các thuật toán phức tạp giúp xác định độ cong cần thiết của thân robot, giúp robot thực hiện nhiều chuyển động khác nhau.
Marchese cho biết: "Để đưa một con robot vào một điểm định sẵn trong không gian, bạn cần phải thiết lập một đường cong gồm các điểm mốc cần thiết để robot di chuyển và đây là điều không hề dễ dàng. Bạn hãy tưởng tượng khi di chuyển vào không gian hẹp như một đường ống, robot cần phải có những điểm mốc để tiếp cận trong quá trình di chuyển. Mục tiêu này khiến cho chương trình phát triển của chúng tôi trở nên phức tạp hơn rất nhiều".
Robot mềm sở hữu nhiều tiềm năng nhưng lĩnh vực này vẫn còn rất mới mẻ và các nhà nghiên cứu vẫn đang tìm kiếm những phương pháp tiếp cận tốt nhất để giải quyết các vấn đề như thiết lập sơ đồ chuyển động và truyền động. Một ví dụ, robot bạch tuộc của CSAIL rất mềm do đó nó không thể sử dụng các loại mô-tơ thông thường. Thay vào đó, nhóm của CSAIL đã tạo ra các kênh rỗng, có thể mở rộng ra cả 2 mặt của robot để khi được nén bằng khí, sức căng sẽ được đặt lên silicon dẻo khiến robot thay đổi hình dạng giống như một quả bóng bơm hơi, qua đó cho phép robot uốn cong về một bên.
Mặc dù là robot mềm nhưng nó vẫn chứa các thành phần cứng như các bộ điều tiết áp suất cao và các chi tiết bằng nhôm để giữ các thành phần với nhau. Marchese cho biết: "Việc loại bỏ hầu hết các thành phần cứng trong thiết kế robot khiến chúng tôi nghĩ về một câu hỏi khó hơn. Liệu chúng ta có thể vận dụng hiệu quả một con robot có thân mềm như kẹo cao su?"
Robot nói trên là bước tiến mới nhất trong loạt nghiên cứu của CSAIL và có thể được sử dụng cho nhiều công việc khác nhau từ việc cầm nắm các mẫu vật trong phòng thí nghiệm đến việc hỗ trợ cho các ca phẫu thuật ít xâm lấn. Phiên bản tiếp theo của robot sẽ tích hợp một "bàn tay" để nó có thể cầm nắm và đặt các vật thể.
Tiêu đề đã được khoahoc.tv đổi lại.
Công nghệ
-

Kỳ lạ loại gỗ có khả năng đổi màu: Thuộc top thế giới về độ cứng và độ bền, Việt Nam cũng trồng
-

3 gia vị quý hiếm có khó tìm của thế giới: Một loại ở Việt Nam mọc khắp nơi!
-

Vì sao ngộ độc botulinum khó chữa?
-

Tại sao Hoa Kỳ lại chế tạo "máy bay ngày tận thế"?
-

Vì sao không có cây cầu nào dám bắc qua sông Amazon?
-

Thí nghiệm từ Mỹ: Điều không ngờ về sinh vật ngoài hành tinh
Công nghệ mới
-

Hạt Higgs - Miếng ghép cuối cùng của vật lý hạt nhân có tồn tại?
-
Nhật Bản phát triển màn hình TV giúp người dùng nếm mùi vị thức ăn
-
Quân đội Mỹ có thể trang bị vũ khí laser năm 2023
-
Thụy Sĩ tạo ra công nghệ tiêu diệt ổ gà
-
Thiết bị giúp người khiếm thính dùng lưỡi để "nghe" được âm thanh
-
Máy bay siêu vượt âm 7.400km/h của Lockheed Martin sẽ bay thử năm 2025





Tiêu điểm
-
Ưu thế tuyệt đối của chip lượng tử ánh sáng: Rút ngắn 9.000 năm tính toán xuống còn 36 phần triệu giây
-
Trí tuệ nhân tạo giúp nhận diện diễn viên phim 18+
-
Trung Quốc hướng tới tàu ngầm laser di chuyển với tốc độ âm thanh
-
Súng phóng lựu bắn hai loại đạn duy nhất trên thế giới
-
"Trí tuệ nhân tạo" AlphaGo là gì mà khiến con người thán phục?
-
Trí tuệ nhân tạo là gì? AI (artificial intelligence) là gì?
-
Xe đạp điện không có nan hoa, trục vòm bánh "tàng hình" công nghệ bảo mật khủng







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video