kiểm soát cánh tay robot
-
 Công dụng tuyệt vời của mật ong đối với sức khỏe và làm đẹp Mật ong là thực phẩm có rất nhiều công dụng tuyệt vời cho sức khỏe và làm đẹp của con người. Dưới đây là những tác dụng chính của mật ong đối với con người. Bạn sẽ bất vì những lợi ích mà nó có thể mang lại.
Công dụng tuyệt vời của mật ong đối với sức khỏe và làm đẹp Mật ong là thực phẩm có rất nhiều công dụng tuyệt vời cho sức khỏe và làm đẹp của con người. Dưới đây là những tác dụng chính của mật ong đối với con người. Bạn sẽ bất vì những lợi ích mà nó có thể mang lại.
-
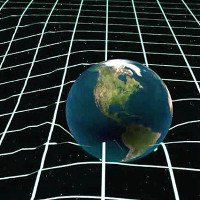 Một nhà toán học vừa công bố phát minh chưa từng có: Tạo ra được lực hấp dẫn Cho đến nay, một tiến bộ như vậy được gọi là giấc mơ của khoa học viễn tưởng.
Một nhà toán học vừa công bố phát minh chưa từng có: Tạo ra được lực hấp dẫn Cho đến nay, một tiến bộ như vậy được gọi là giấc mơ của khoa học viễn tưởng. -
 Hình dạng ngón tay nói lên tính cách của bạn Thông qua hình dáng, khoảng cách của mỗi ngón tay ta có thể đoán được tính cách của người đó. Ngoài ra, mỗi người có một ngón tay "mạnh, yếu" khác nhau cho thấy bạn giỏi yếu ở lĩnh vực nào.
Hình dạng ngón tay nói lên tính cách của bạn Thông qua hình dáng, khoảng cách của mỗi ngón tay ta có thể đoán được tính cách của người đó. Ngoài ra, mỗi người có một ngón tay "mạnh, yếu" khác nhau cho thấy bạn giỏi yếu ở lĩnh vực nào.
-
 Nguyên nhân và cách đối phó khi trẻ ra nhiều mồ hôi tay, chân Bệnh ra mồ hôi tay, chân là bệnh gặp ở nhiều người trong đó có cả trẻ nhỏ. Bệnh có vẻ không có gì là ghê gớm, thế nhưng nó lại dai dẳng, gây khó chịu cho người bệnh.
Nguyên nhân và cách đối phó khi trẻ ra nhiều mồ hôi tay, chân Bệnh ra mồ hôi tay, chân là bệnh gặp ở nhiều người trong đó có cả trẻ nhỏ. Bệnh có vẻ không có gì là ghê gớm, thế nhưng nó lại dai dẳng, gây khó chịu cho người bệnh. -
 Những cách bảo vệ môi trường sống Bảo vệ môi trường là gì? Bảo vệ môi trường bằng cách nào? Chúng ta biết rằng môi trường sống quanh ta ngày càng xấu đi, vậy hãy bảo vệ chúng từ những việc nhỏ trong chính cuộc sống của mình.
Những cách bảo vệ môi trường sống Bảo vệ môi trường là gì? Bảo vệ môi trường bằng cách nào? Chúng ta biết rằng môi trường sống quanh ta ngày càng xấu đi, vậy hãy bảo vệ chúng từ những việc nhỏ trong chính cuộc sống của mình. -
 17 cách giúp nhà của bạn mát mẻ hơn trong những ngày nắng nóng Đây đều là những mẹo nhỏ mà bạn có thể áp dụng ngay để căn phòng được mát, có cả bí kíp của người Ai Cập cổ.
17 cách giúp nhà của bạn mát mẻ hơn trong những ngày nắng nóng Đây đều là những mẹo nhỏ mà bạn có thể áp dụng ngay để căn phòng được mát, có cả bí kíp của người Ai Cập cổ. -
 Hàng loạt cây cảnh chứa chất độc chết người Các nhà sinh học cảnh báo trong số cây cảnh trồng trong nhà có nhiều loại cây chứa độc tố gây chết người nếu ăn phải.
Hàng loạt cây cảnh chứa chất độc chết người Các nhà sinh học cảnh báo trong số cây cảnh trồng trong nhà có nhiều loại cây chứa độc tố gây chết người nếu ăn phải. -
 Trồng rau bằng phương pháp thủy canh Thủy canh là phương pháp trồng rau sạch không cần dùng đất rất phù hợp với người dân ở thành phố. Các gia đình có thể tự trồng trọt trực tiếp vào dung dịch dinh dưỡng để đảm bảo vệt sinh an toàn thực phẩm cho gia đình.
Trồng rau bằng phương pháp thủy canh Thủy canh là phương pháp trồng rau sạch không cần dùng đất rất phù hợp với người dân ở thành phố. Các gia đình có thể tự trồng trọt trực tiếp vào dung dịch dinh dưỡng để đảm bảo vệt sinh an toàn thực phẩm cho gia đình. -
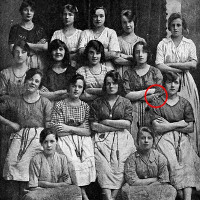 "Cánh tay ma" trong bức ảnh 100 năm tuổi Bức ảnh chụp những cô gái Ireland làm việc tại một nhà máy sản xuất lanh vào năm 1900 chứa đựng yếu tố có thể khiến nhiều người sợ hãi.
"Cánh tay ma" trong bức ảnh 100 năm tuổi Bức ảnh chụp những cô gái Ireland làm việc tại một nhà máy sản xuất lanh vào năm 1900 chứa đựng yếu tố có thể khiến nhiều người sợ hãi. -
 Người thuận tay trái và 16 sự thật "gây sốc" Thuận tay trái luôn là đề tài rất được mọi người chú ý nhưng dù cho có hàng loạt nghiên cứu đã được công bố thì vẫn có khá nhiều bí ẩn về những người thuận tay trái mà bạn chưa biết đấy.
Người thuận tay trái và 16 sự thật "gây sốc" Thuận tay trái luôn là đề tài rất được mọi người chú ý nhưng dù cho có hàng loạt nghiên cứu đã được công bố thì vẫn có khá nhiều bí ẩn về những người thuận tay trái mà bạn chưa biết đấy.
 Khoa học quân sự
Khoa học quân sự  Tại sao
Tại sao  Địa danh nổi tiếng
Địa danh nổi tiếng  Bệnh và thông tin bệnh
Bệnh và thông tin bệnh  Virus Covid 19
Virus Covid 19