-
 Những điều có thể bạn chưa biết về giấc mơ
Những điều có thể bạn chưa biết về giấc mơ Mơ ngủ là hiện tượng thường xuyên xảy ra với mỗi con người nhưng bạn có hiểu gì về giấc mơ của mình?
-
 Cách khắc phục khi máy lạnh bị chớp đèn
Cách khắc phục khi máy lạnh bị chớp đèn Trong quá trình sử dụng, sau một thời gian máy lạnh nhà bạn xuất hiện hiện tượng nhấp nháy đèn và kém nhiệt. Bạn băn khoăn không hiểu nguyên nhân vì sao và cách khắc phục như thế nào?
-
 Mẹo hay chữa cảm cúm mà không cần uống kháng sinh
Mẹo hay chữa cảm cúm mà không cần uống kháng sinh Thay vì dùng kháng sinh, người bị cảm cúm có thể điều trị bằng cách nghỉ ngơi, uống nhiều nước và sử dụng các dược liệu thiên nhiên.
-
 Các ký hiệu trong máy giặt và trên nhãn mác quần áo cần biết
Các ký hiệu trong máy giặt và trên nhãn mác quần áo cần biết Không phải quần áo nào cũng giống nhau nên không thể giặt tất cả quần áo với cùng một chế độ giặt.
-
 Nguyên nhân và cách đối phó khi trẻ ra nhiều mồ hôi tay, chân
Nguyên nhân và cách đối phó khi trẻ ra nhiều mồ hôi tay, chân Bệnh ra mồ hôi tay, chân là bệnh gặp ở nhiều người trong đó có cả trẻ nhỏ. Bệnh có vẻ không có gì là ghê gớm, thế nhưng nó lại dai dẳng, gây khó chịu cho người bệnh.
-
 Video: Rắn bị diều hâu ghì chặt vẫn gồng lên cắn trả, đau đớn mất đi đôi mắt!
Video: Rắn bị diều hâu ghì chặt vẫn gồng lên cắn trả, đau đớn mất đi đôi mắt! Con rắn cố gắng cắn trả kẻ thù nhưng kết cục chính nó lại bị diều hâu tước đi đôi mắt.
-
 Những thực phẩm bổ dưỡng cho trí não
Những thực phẩm bổ dưỡng cho trí não Chúng ta sẽ già đi theo thời gian, và bộ não chúng ta cũng vậy. Tuy nhiên, ta có thể làm tăng năng lực của não bằng cách ăn những thức ăn đầy đủ và cân bằng trong khẩu phần.
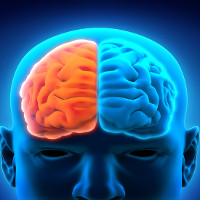 Sự khác nhau giữa những người dùng bán cầu não trái và phải Bộ não của chúng ta được chia làm hai bán cầu, mỗi bên thực hiện các chức năng khác nhau. Và việc sử dụng nhiều bán cầu não phải hay trái nhiều hơn sẽ quyết định những kỹ năng và sở thích của chúng ta.
Sự khác nhau giữa những người dùng bán cầu não trái và phải Bộ não của chúng ta được chia làm hai bán cầu, mỗi bên thực hiện các chức năng khác nhau. Và việc sử dụng nhiều bán cầu não phải hay trái nhiều hơn sẽ quyết định những kỹ năng và sở thích của chúng ta. Bí ẩn hai viên gạch bằng vàng nặng 15kg tìm thấy trong mộ danh thần nổi tiếng Hai khối vàng to bằng viên gạch nặng 15kg được tìm thấy trong mộ danh thần nổi tiếng mang trong mình bí ẩn đằng sau khiến tất cả mọi người tại đó đều tò mò, hiếu kỳ thậm chí trầm hẳn xuống.
Bí ẩn hai viên gạch bằng vàng nặng 15kg tìm thấy trong mộ danh thần nổi tiếng Hai khối vàng to bằng viên gạch nặng 15kg được tìm thấy trong mộ danh thần nổi tiếng mang trong mình bí ẩn đằng sau khiến tất cả mọi người tại đó đều tò mò, hiếu kỳ thậm chí trầm hẳn xuống. Video: Diều hâu sà xuống tấn công con rắn đen sì thì bị nạn nhân cắn trả, liệu kẻ nào sẽ tử nạn? Việc con mồi phản công và giết chết kẻ ăn thịt không phải là điều hiếm thấy trong tự nhiên. Lần này có xảy ra như vậy?
Video: Diều hâu sà xuống tấn công con rắn đen sì thì bị nạn nhân cắn trả, liệu kẻ nào sẽ tử nạn? Việc con mồi phản công và giết chết kẻ ăn thịt không phải là điều hiếm thấy trong tự nhiên. Lần này có xảy ra như vậy? Khoa học quân sự
Khoa học quân sự  Tại sao
Tại sao  Địa danh nổi tiếng
Địa danh nổi tiếng  Bệnh và thông tin bệnh
Bệnh và thông tin bệnh  Virus Covid 19
Virus Covid 19