-
 Acsimet - nhà bác học vĩ đại của Hy Lạp cổ
Acsimet - nhà bác học vĩ đại của Hy Lạp cổ Archimedes của Syracuse là một nhà toán học, nhà vật lý, kỹ sư, nhà phát minh, và một nhà thiên văn học người Hy Lạp. Dù ít chi tiết về cuộc đời ông được biết, ông được coi là một trong những nhà khoa học hàng đầu của thời kỳ cổ đại.
-
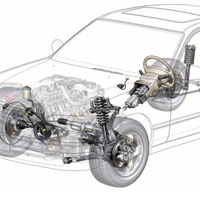 Nguyên lý hoạt động của hệ thống lái
Nguyên lý hoạt động của hệ thống lái Khi bạn xoay vành tay lái đi, đương nhiên chiếc xe của bạn sẽ chuyển hướng theo phía mà bạn muốn. Thế nhưng quan hệ “nhân quả” của chúng như thế nào? Chắc chắn sẽ có nhiều điều thú vị khi bạn tìm hiểu về nguyên lý l&a
-
 Đáp án của các nhà khoa học: Gà có trước trứng!
Đáp án của các nhà khoa học: Gà có trước trứng! Việc phát hiện một loại chất protein đặc biệt đã giúp các nhà khoa học trả lời cho câu hỏi chưa tìm được lời đáp trong suốt hàng ngàn năm qua.
-
 8 trường hợp "vượt thời gian" không có lời giải nổi tiếng thế giới
8 trường hợp "vượt thời gian" không có lời giải nổi tiếng thế giới Cho đến bây giờ, khoa học vẫn chưa thể đưa ra được bất cứ lý do nào thích hợp để giải thích những trường hợp bí ẩn dưới đây.
-
 Bộ đề xe máy và hư hỏng thường gặp
Bộ đề xe máy và hư hỏng thường gặp Xe khó khởi động, hoạt động chập chờn, có tiếng vả răng khi đề cho thấy bộ đề đã bị hư hỏng.
-
 Những nhà khoa học lỗi lạc nhất trong lịch sử
Những nhà khoa học lỗi lạc nhất trong lịch sử Các nhà khoa học là những người rất quan trọng đối với nhân loại. Nhờ có những phát minh, công trình nghiên cứu của học mà thế giới mới phát triển như ngày nay.
-
 Người uống rượu bị đỏ mặt nên cẩn trọng
Người uống rượu bị đỏ mặt nên cẩn trọng Đỏ mặt khi uống bia, rượu là phản ứng phổ biến ở nhiều người, nhưng theo nhóm chuyên gia Hàn Quốc thuộc Đại học Quốc gia Chungnam thì đó có thể là một dấu hiệu cảnh báo nguy cơ phát triển bệnh cao huyết áp.
 Thành tựu khoa học, công nghệ đóng góp cho phát triển KT-XH Nhiều kết quả nghiên cứu khoa học và ứng dụng công nghệ có đóng góp đáng kể cho sự phát triển KT-XH tại Việt Nam...
Thành tựu khoa học, công nghệ đóng góp cho phát triển KT-XH Nhiều kết quả nghiên cứu khoa học và ứng dụng công nghệ có đóng góp đáng kể cho sự phát triển KT-XH tại Việt Nam... Vì sao vận động viên tắm và sử dụng khăn nhỏ sau khi rời bể bơi? Sau khi các vận động viên rời khỏi mặt nước, họ sẽ tắm nhanh tại vòi sen cạnh bể bơi và lau người bằng khăn nhỏ.
Vì sao vận động viên tắm và sử dụng khăn nhỏ sau khi rời bể bơi? Sau khi các vận động viên rời khỏi mặt nước, họ sẽ tắm nhanh tại vòi sen cạnh bể bơi và lau người bằng khăn nhỏ.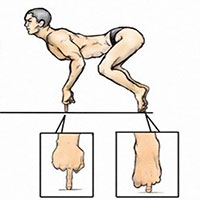 Điều gì sẽ xảy ra nếu cơ thể con người có cấu trúc tương tự động vật? Bằng cách bắt chước lại các đặc điểm giải phẫu học của động vật, một họa sĩ Nhật Bản đã tạo ra những phiên bản “người lai” đặc biệt, từ đó giúp chúng ta có cái nhìn trực quan về cơ thể các loài chim, thú, bò sát…
Điều gì sẽ xảy ra nếu cơ thể con người có cấu trúc tương tự động vật? Bằng cách bắt chước lại các đặc điểm giải phẫu học của động vật, một họa sĩ Nhật Bản đã tạo ra những phiên bản “người lai” đặc biệt, từ đó giúp chúng ta có cái nhìn trực quan về cơ thể các loài chim, thú, bò sát… Khoa học quân sự
Khoa học quân sự  Tại sao
Tại sao  Địa danh nổi tiếng
Địa danh nổi tiếng  Bệnh và thông tin bệnh
Bệnh và thông tin bệnh  Virus Covid 19
Virus Covid 19