Robot Đức sẽ thám hiểm Mặt trăng
Trong khi người Nhật chuẩn bị đưa tiểu robot hình người lên Trạm Không gian Quốc tế (ISS) thì các nhà khoa học Đức lại thực hiện dự án thiết kế robot lên thăm dò Mặt trăng.
Trung tâm DFKI và ZARM (Trung tâm ứng dụng công nghệ không gian và môi trường không trọng lực) hợp tác thiết kế cặp robot có thể lên thám hiểm miệng núi lửa trên Mặt trăng. Dự án sẽ thiết kế loại robot RIMRES với 6 chân có thể di chuyển nhanh hơn loại trang bị bánh xe lăn.

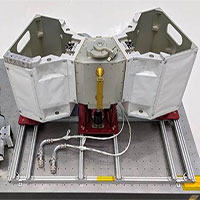
Robot Rimres
Cặp robot bao gồm SHERPA và CREX. Trong đó, SHERPA dài 2,4m, nặng 200kg, di chuyển bằng hệ thống bánh xe chân khớp kết hợp bánh xe lăn trên địa hình gập gềnh của Mặt trăng, các chân có thể tự nâng một cách độc lập để giúp nó trèo qua các tảng đá, tránh bị kẹt khi di chuyển. Phần bụng của SHERPA được trang bị cánh tay dài 1,8m. Nhiệm vụ chính của SHERPA là vận chuyển robot trinh sát nhỏ có tên gọi CREX.
CREX dài 1m và nặng 27kg. Vì nhỏ, nhẹ và chậm nên CREX phải nhờ SHERPA vận chuyển từ nơi này đến nơi khác. Khi tới vị trí "công tác", CREX có thể tự vận động với hệ thống các chân khớp của nó cùng với sự hỗ trợ của các bộ phận cảm biến.
Tiền thân của dự án RIMRES là dự án SpaceClimber được nghiên cứu từ năm 2007-2010.
Theo tạp chí Gizmag thì cần thêm vài năm nữa để cặp robot SHERPA và CREX được hoàn thiện cho nhiệm vụ thám hiểm chị Hằng.
Khám phá
-

Nguồn gốc và ý nghĩa nhân văn của Tết Nguyên Đán
-

Những loại thực phẩm "vàng" tốt nhất cho phổi
-

Thác nước hùng vĩ nhất thế giới ngừng chảy sau 12.000 năm, sững sờ cảnh tượng bên dưới
-

Lịch sử, ý nghĩa ngày thương binh liệt sĩ 27/7
-

Tại sao không có loài săn mồi nào ăn thịt linh cẩu đốm?
-

Trung Quốc phát triển giống lúa lai kỳ lạ: Gieo trồng một lần thu hoạch trong nhiều năm
Khoa học vũ trụ
-

Vệ tinh "Made in Vietnam" huỷ phóng trước một phút
-
NASA đưa "khách sạn robot" lên trạm vũ trụ quốc tế
-
Nhà mới của phi hành gia trên trạm vũ trụ
-
Những điều ít biết về các phi hành gia
-
Tàu NEOWISE gửi về sau khi bắt đầu sứ mạng mới
-
Tàu vũ trụ SpaceX "mất tích" khi trở lại Trái đất




Tiêu điểm
-
Một trong những ngôi sao sáng nhất bầu trời vừa nổ
-
“Tinh thể thời gian”: Trạng thái vật chất hoàn toàn mới đối với nhân loại!
-
Truyền thuyết về 12 chòm sao
-
Liệu thuyết Big Bang có thể sai?
-
Hành tinh có gió giật 8.700km/h và khí quyển 3.000 độ C
-
Sau hơn 40 năm "phiêu bạt" ngoài không gian thì đây là thành quả gửi về từ tàu thăm dò vũ trụ Voyager
-
Khoảng cách từ Trái Đất đến Mặt Trời là bao nhiêu?







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video