Sử dụng vòi của voi làm mẫu thiết kế - chế tạo cánh tay bằng kỹ thuật sinh học
Hung thích một cánh tay của…voi. Đúng vậy, các kỹ sư người Đức đang giữ một bản thảo vẽ bằng tay từ một người mẹ bình thường và đang tạo mẫu chế tạo một cánh tay mới bằng kỹ thuật sinh học sau khi làm phẫu thuật vòi của một con voi. Cánh tay này dài, màu xám, mềm mại – có chứa không ít hơn 40.000 cơ bắp – cực kỳ nhanh nhẹn.
Con voi dùng vòi của nó để bắt lấy các đồ vật và dùng để uống nước. Với những cái vòi của chúng, loài thú da dày này có thể quật ngã cây cối và kéo được những vật nặng, và đương nhiên cũng có thể biểu diễn được những thao tác cực kỳ tinh vi. Các nghiên cứu gia tại “The Fraunhofer Institute for Manufacturing Engineering và Automation IPA” ở Stuttgart đã sử dụng vói của con voi để làm mẫu thiết kế.
Harald Staab, nghiên cứu gia thuộc Viện IPA – là người đã phát minh và phát triển kỹ thuật này cho biết: “Sự nhanh nhẹn và tính uyển chuyển của nó đã cho chúng ta ý tưởng về một cánh tay robot bằng kỹ thuật sinh học, ISELLA."
 Các cánh tay robot thường đem lại rủi ro cho những người điều khiển máy móc – một sự cố kỹ thuật có thể gây ra những động tác lung tung, không thể nào điều khiển được. Không giống ISELLA lắm. Trong khi những cánh tay robot thường chỉ có 1 mô-tơ dùng để điều khiển từng khớp nối lại với nhau, ISELLA lại có hai, được nhóm lại thành cặp để khi nếu một mô-tơ điều khiển bị hư, cái thứ hai sẽ đảm trách ngăn chặn những động tác không thể điều khiển được.
Các cánh tay robot thường đem lại rủi ro cho những người điều khiển máy móc – một sự cố kỹ thuật có thể gây ra những động tác lung tung, không thể nào điều khiển được. Không giống ISELLA lắm. Trong khi những cánh tay robot thường chỉ có 1 mô-tơ dùng để điều khiển từng khớp nối lại với nhau, ISELLA lại có hai, được nhóm lại thành cặp để khi nếu một mô-tơ điều khiển bị hư, cái thứ hai sẽ đảm trách ngăn chặn những động tác không thể điều khiển được.
Staab giải thích: “Không giống những hệ thống chạy bằng khí nén hay bằng thủy lực, cánh tay robot của chúng ta có một cơ bắp vừa đơn giản lại có giá thành thấp, bao gồm một mô-tơ nhỏ cùng với một đòn lái và một sợi dây.” Tương tự như vậy, sợi dây chằng gắn liền cơ bắp với với cơ bắp khác, sợi dây nối hai bộ phận hoạt động có liên quan lại với nhau. Đòn lái thì được gắn liền với điểm giữa của sợi dây. Khi tay đòn xoay, sợi dây sẽ quấn quanh nó ở cả hai mặt, tạo thành một kiểu xoắn đôi. Các nhà nghiên cứu đặt tên cho kiểu xoắn này là DOHELIX.
Staab giải thích: “Cái tay đòn thì không dày hơn sợi dây, nhưng đủ chắc để không bị đứt. Vì vậy, nó có một tỉ lệ truyền động cao hơn so với một mô-tơ truyền động bằng số thông thường.”
Mục đích này đã đạt được bằng cách sử dụng những vật liệu đàn hồi có độ chằng rất cao – loại vật liệu dùng để sản xuất những cánh buồm dùng cho thuyền buồm và khung sườn làm diều lượn. Theo như kết quả có được, DOHELIX rẻ hơn nhiều và có hiệu suất năng lượng hơn so với một hệ thống truyền động bằng bánh răng. Sức căng của nó có thể chịu nhiều loại cường độ lớn hơn trọng lượng của chính nó, và các hệ thống truyền động dựa trên khái niệm DOHELIX có thể được dùng trong các ứng dụng trên tất cả các tỉ lệ - từ tỉ lệ micrô-mét dùng cho cơ bắp cho đến những cái cần cẩu container dùng ở các hải cảng.
Cánh tay robot ISELLA bao gồm tổng số 10 cơ bắp DOHELIX, cung ứng một cơ gấp và một cơ duỗi cho mỗi khớp nối, bốn cái đặt ở khuỷu tay và sáu cái ở cánh tay trên. Cánh tay robot thì linh hoạt như cánh tay người. Staab thuật lại: “Lúc này chúng tôi đang làm ở phần khuỷu tay.” Staab ước đoán: “Những ứng dụng có thể được áp dụng phương pháp ISELLA gồm: sự phục hồi trong y khoa, ví dụ như trong liệu pháp chữa trị nhằm phục hồi năng lực sử dụng tứ chi bị tổn thương, và những bộ phận giả có khả năng linh hoạt, chi phí thấp. Những thiết bị như vậy có thể mua được trên thị trường trong khoảng hai năm nữa.”
DANH PHƯƠNG
Khám phá
-

Lần đầu tiên chụp được hình ảnh X quang của một nguyên tử
-

Những lợi ích thú vị của quả xoài
-

Thứ trong ảnh không phải ngôi sao, mà là "con thú" khiến cả vũ trụ khiếp sợ
-
Những điều kỳ lạ trong cuộc sống con người 100 năm về trước mà người hiện đại chắc chắn không thể lý giải
-
Những ngọn núi hình kim tự tháp của Trung Quốc làm dấy lên vô số thuyết âm mưu!
-

Loài côn trùng độc đáo biến người thành tín đồ ăn chay
Công nghệ sinh học
-

Gần 1 triệu USD nâng cao quản lý an toàn sinh học
-
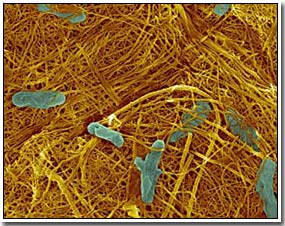
Vi khuẩn tạo ống nano cácbon
-
Tiết lộ cấu trúc cơ quan cảm nhận vị cay và sự đau đớn
-
Human-Animal Hybrid - Sản phẩm lai người và động vật
-
Hàng ngàn hóa chất cần được đánh giá lại về độc tính
-
Năng suất lúa sẽ tăng 30-50% trong 10-15 năm tới nhờ các giống mới




Tiêu điểm
-
Chúng ta có thể tạo ra xe hơi, vậy tại sao chúng ta không thể tạo ra tế bào?
-
Các nhà khoa học làm gì để hồi sinh loài khủng long?
-
Tế bào gốc: The hard copy
-
Phục dựng thành công khuôn mặt từ hộp sọ 1.000 năm tuổi
-
Chế tạo tơ nhện nhân tạo: nhiều ứng dụng ích lợi trong tương lai
-
Cảnh sát Nga: Lai tạo thành công giống mới giữa chó nhà và chó sói
-
Trung Quốc: tạo ra giống voi không ngà







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video