Thiết kế mẫu chuột robot tìm người sống sót ở vùng thiên tai
Nhóm nghiên cứu đến từ Trung Quốc thiết kế mẫu robot dựa theo kích thước, hình dạng và khả năng luồn lách của chuột thật để hỗ trợ tìm kiếm cứu hộ hoặc thăm dò.

Robot SQuRo mô phỏng chuột cống Na Uy. (Ảnh: Qing Shi)
Tuy các nhà khoa học đã tạo ra những robot khám phá không gian hẹp dựa trên rắn và gián, chuột cũng là loài vật thích nghi cao với việc luồn lách qua khe hẹp và di chuyển trên địa hình kém bằng phẳng. Giờ đây, nhóm nghiên đứng đầu là giáo sư Qing Shi ở Viện Công nghệ Bắc Kinh, Trung Quốc, đang phát triển một mẫu chuột robot có tên Chuột robot 4 chân cỡ nhỏ (SQuRo).
Dựa trên kích thước cơ thể và hình dạng của chuột Na Uy (rattus norvegicus), robot mới có hai nấc điều chỉnh ở mỗi chân, eo và đầu. Cách bố trí này mô phỏng cột sống linh hoạt của chuột thật, cho phép robot uốn gập cơ thể nhanh chóng và xoay vòng. Nó có bán kính quay vòng tối thiểu chỉ bằng 0,48 chiều dài cơ thể, nhỏ hơn nhiều so với các robot 4 chân khác cùng kích thước. SQuRo cũng thuôn và nhẹ hơn những robot cùng loại với trọng lượng 220 g. Nó có thể mang vật nặng lên tới 200 g như camera và cảm biến.
Chuột robot có thể tự đứng dậy sau khi ngã, chui qua lối đi khúc khuỷu hẹp cỡ 90 mm, di chuyển qua chướng ngại vật cao 300 mm và duy trì vận động ổn định trong lúc leo dốc 15 độ. Chuyển động của nó được kiểm soát bởi bộ vi xử lý tích hợp, tự động chuyển đổi giữa 3 chế độ chuyển động cơ bản dựa trên phản lực từ mặt đất. Đó là lực tạo bởi mặt đất lên cơ thể tiếp xúc.
Nhóm nghiên cứu hy vọng sau khi phát triển công nghệ sâu hơn, SQuRo có thể ứng dụng trong nhiệm vụ tìm kiếm người sống sót ở vùng thiên tai hoặc kiểm tra những khu vực khó tiếp cận. Họ công bố kết quả nghiên cứu trên tạp chí IEEE Transactions on Robotics.
- Virus bệnh cúm có thể sống sót ở xứ lạnh?
- Mỹ tặng Nhật Bản robot khắc phục thảm họa thiên tai
- Robot tìm sự sống tại nơi khắc nghiệt nhất
- Thiết bị siêu nhỏ tìm vàng trên thiên thạch
- Thiết kế của 10 đoàn tàu Metro ở Hà Nội
- Thiết kế mẫu xe đạp điện để vừa trong ba lô
- Thiết kế mẫu cá robot để đuổi cá xâm hại
Công nghệ
-
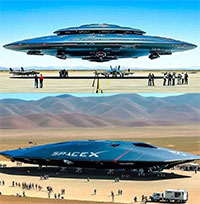
Ông chủ SpaceX Elon Musk tiết lộ phi thuyền vũ trụ và UFO thách thức vật lý?
-
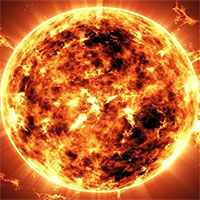
Mặt trời còn có thể cháy trong 5 tỷ năm, tại sao loài người chỉ còn 1 tỷ năm nữa?
-

Việt Nam có một loại cây lạ có thể uống trực tiếp từ thân cây, dễ gây nghiện
-
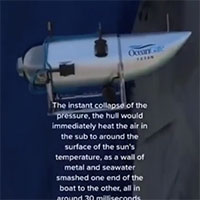
Khoảnh khắc mô phỏng tàu ngầm Titan nổ tung trong tích tắc
-
Vì sao chúng ta tử tế với người ngoài hơn người thân?
-
Người được phong giáo sư khi tròn 30 tuổi, là viện trưởng trẻ tuổi nhất trong lịch sử khoa học Việt Nam!
Công nghệ mới
-

Các nhà khoa học phát triển thành công "bút" viết được trong nước
-
Robot dọn sạch vỏ tàu, cứu tinh cho ngành hàng hải
-
Loại thủy tinh mới có thể phân huỷ và tiết canxi vào trong cơ thể
-
Bình Định đề xuất thí điểm taxi bay
-
Chế tạo thành công thiết bị biến nước tiểu thành nước làm bia
-
Không cần dệt, áo len sắp được in nhờ công nghệ 3D




Tiêu điểm
-
Tìm ra công nghệ pin vĩnh cửu không gây ô nhiễm
-
Chiếc máy tính mạnh nhất thế giới
-
Trí tuệ nhân tạo giúp nhận diện diễn viên phim 18+
-
Xe VinFast VF8 không người lái chạy thử nghiệm trên đường phố Việt
-
Các nhà khoa học đã phát triển loại pin có thể dùng tới hàng nghìn năm mà không cần cắm sạc!
-
Vật liệu nhẹ nhất thế giới, nhẹ hơn cả không khí nay đã có thể in 3D
-
Trung Quốc phát triển thành công xe cơ giới quân sự nhanh nhất thế giới







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video
