Vây cá robot cho tàu ngầm
Lấy cảm hứng từ chuyển động bơi hiệu quả của cá thái dương bluegill, các nhà khoa học MIT đang chế tạo một chiếc vây cá cơ học có khả năng đẩy tàu ngầm vào một ngày nào đó.
Tàu ngầm chân vịt, hay động cơ tự động dưới nước AUV, hiện đang thực hiện nhiều chức năng khác nhau, từ lập bản đồ đáy đại dương cho đến điều tra các vụ đắm tàu. Nhưng nhóm nghiên cứu MIT hy vọng tạo ra được một robot dưới nước linh hoạt hơn, tốt hơn, thích hợp cho các hoạt động quân sự như tháo mìn và thám thính cảng – và họ hy vọng sẽ cho tàu bắt chước chuyển động của cá thái dương bluegill.
“Nếu chúng tôi có thể tạo ra được chiếc tàu ngầm có khả năng di chuyển, dự trữ năng lượng và làm tất cả mọi thứ như một con cá thì chúng sẽ tốt hơn rất nhiều so với các động cơ vận hành từ xa mà chúng ta đang có hiện giờ,” ông James Tangorra, tiến sĩ cao cấp thực hiện nghiên cứu này, phát biểu.
Các nhà nghiên cứu chọn bắt chước cá thái dương bluegill do khả năng bơi đặc biệt của nó và chính khả năng này tạo ra sức đẩy nhanh về phía trước liên tục mà không bị kéo về phía sau.
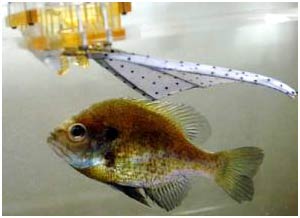 |
Cá thái dương bluegill bơi trong hồ thí nghiệm của MIT gần vây cá robot. (Ảnh: Donna Coveney) |
Cho đến giờ, nhóm nghiên cứu đã chế tạo ra được những chiếc vây đầu tiên có khả năng bắt chước thành công chiếc vây của cá thái dương.
Chiếc vây gần đây nhất được làm bằng chất liệu mỏng, linh hoạt và dẫn điện. Vây cá này có khả năng bắt chước hai chuyển động mà các nhà khoa học xác định là quan trọng đối với sức đẩy tới của cá thái dương: Đó là động tác lướt về phía trước của vây cá và động tác uốn đồng thời của gờ trên và gờ dưới của vây cá.
Khi một dòng điện chạy qua vây cá này, nó lướt về phía trước giống như cá thái dương, Bằng cách thay đổi hướng của dòng điện, các nhà khoa học có thể làm cho vây cá uốn về phía trước tại các gờ trên và gờ dưới của vây, nhưng để làm cho vây cá lướt và uốn cùng một lúc thật sự là một thách thức. Bằch cách đặt các dây Mylar một cách khéo léo dọc theo các vây để làm cho vây chuyển động theo hướng theo mong muốn, các nhà khoa học đã thành công, nhưng nhóm nghiên cứu vẫn tiếp tục tìm kiếm các giải pháp lựa chọn khác.
Chiếc vây cá thế hệ đầu tiên đã bắt chước thành công chuyển động lướt và uốn của cá thái dương, nhưng các động cơ sử dụng để điều khiển vây còn quá lớn và ồn khi sử dụng cho tàu ngầm. Phương pháp mới của các nhà nghiên cứu là sử dụng chất liệu polymer mới, loại bỏ việc cần thiết sử dụng động cơ điện. Chất liệu này được tạo ra từ một dung dịch hoá học, cho phép người chế tạo kiểm soát được nhiều hơn cấu trúc phân tử của nó.
Trong nghiên cứu tương lai, nhóm dự định sẽ nghiên cứu các mặt khác của chuyển động của cá thái dương, bao gồm sự tương tác giữa các vây khác nhau, giữa vây và cơ thể cá. Điều này sẽ giúp các kỹ sư xác định được làm thế nào để thích nghi các quy luật thiên nhiên vào chế tạo động cơ robot một cách tốt nhất.
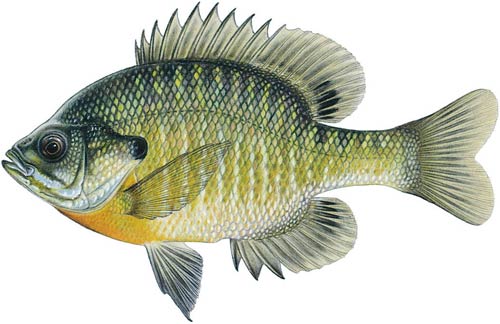
(Ảnh: dfw.state.or.us)
Thanh Vân
Công nghệ
-
Ra ngoài Hệ Mặt trời, tàu NASA đụng độ "thế giới ngược đời"
-
Ảo giác cửa sổ Ames: Thứ có thể khiến bạn hoài nghi cả vũ trụ và nền khoa học của con người
-

Công nghệ thời cổ đại tinh vi hơn cả những gì chúng ta nghĩ, người hiện đại chưa chắc đã ngờ đến
-

Xôn xao UFO dài 15m lộ diện sau bão: Bí ẩn chưa lời giải!
-

Một "đinh vít" từ 300 triệu năm trước được gắn trong một viên đá, tiết lộ thời kỳ đỉnh cao tiền sử?
-

Phía sau năng lực phi thường của người Sherpa trên đỉnh Himalaya
Phát minh khoa học
-

Người Việt sáng chế máy xét nghiệm nhanh Covid-19 giá rẻ
-
Nữ sinh lớp 6 phát minh robot "săn" rác nhựa trên biển
-
Ai đã phát minh ra máy vi tính chụp cắt lớp phân tầng?
-
Máy phát hiện sớm hiện tượng rò rỉ gas trong gia đình
-
Nga phát minh vật liệu phủ đặc biệt bảo vệ chống bức xạ và tự chữa lành
-
Những phát minh kiến trúc vĩ đại của người La Mã




Tiêu điểm
-
12 phát minh "không tưởng" của Nikola Tesla
-
20 phát minh nổi tiếng của Trung Hoa cổ đại
-
Thước trượt - Phát minh đơn giản làm thay đổi cả lịch sử khoa học thế giới
-
Phát minh mới cho ra đời pin vĩnh cửu
-
Các phương trình đẹp nhất mọi thời đại!
-
Những phát minh kỳ dị, khó hiểu của người xưa
-
Tách kháng sinh, 'giải độc' cho mật ong xuất khẩu







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video