Làm thế nào mà robot hút bụi biết dò đường và né đồ vật tài tình thế nhỉ?
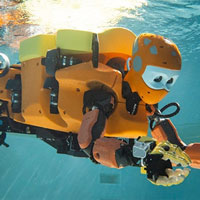
Robot hút bụi nhỏ gọn ngày càng trở nên phổ biến trong các hộ gia đình, dần thay thế cho những chiếc máy hút bụi cồng kềnh. Những robot này di chuyển khắp sàn nhà, hút sạch bụi bẩn và sau đó tự quay trở về ổ để sạc điện. Làm thế nào mà những robot này có thể di chuyển và làm sạch một cách thông minh đến vậy? Hóa ra bên trong mỗi robot hút bụi nhỏ bé đều sở hữu nhiều loại cảm biến cùng với những tính năng ưu việt được lập trình sẵn, giúp chúng có thể làm việc tự động hoặc tuân theo sự điều khiển của người dùng.
Các robot hút bụi không sử dụng hệ thống camera để quan sát thế giới xung quanh. Thay vào đó, chúng chứa nhiều loại cảm biến khác nhau giúp phát hiện và đo đạc các vật thể, nhờ đó tránh được các chướng ngại vật. Các cảm biến cơ bản trong một robot hút bụi gồm: cảm biến vách đá (Cliff sensors), cảm biến va chạm (bump sensors), cảm biến tường (wall sensors) và bộ mã hóa quang học (optical encoders). Tùy thuộc vào từng phiên bản, robot hút bụi còn có các cảm biến bổ sung, chẳng hạn như máy quét bụi để đo lượng bụi đang được hút.
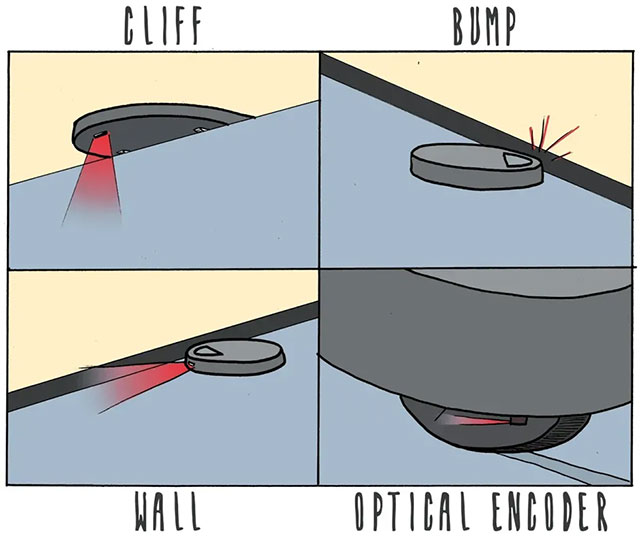
Những cảm biến có trong robot hút bụi giúp chúng di chuyển thông minh
“Cliff sensors” là loại cảm biến giúp đo khoảng cách giữa bệ robot và mặt sàn, bằng cách phản xạ ánh sáng hồng ngoại từ sàn nhà. Nếu khoảng cách này tăng đột ngột, có nghĩa là robot đang tiến gần đến mép cầu thang hoặc thứ gì đó tương tự, vì vậy nó sẽ lùi lại để tránh bị rơi vỡ (do đó có tên cliff sensors- "cảm biến vách đá").
Tên gọi “bump sensors” cũng phản ánh công dụng của loại cảm biến này: nếu robot hút bụi va vào vật gì đó (như tường hoặc chân ghế), tác động sẽ kích hoạt cảm biến. Cảm biến tường (wall sensors) tương tự như cảm biến vách đá, chúng cho robot biết khi nào nó ở gần một bức tường, theo đó tự điều chỉnh để đi men theo tường.
Bộ mã hóa quang học (optical encoders) được xem là bộ phận quan trọng nhất, chúng nằm trên bánh xe của robot, giúp tính quãng đường đã đi được. Được gọi là bộ mã hóa quang học, chúng sử dụng cảm biến ánh sáng để phát hiện bánh xe đã quay bao nhiêu lần, từ đó tính ra quãng đường mà robot đã đi được.
Nhờ sự kết hợp nhuần nhuyễn của các cảm biến, robot biết nó đã đi được bao xa, những thứ nó đã va phải và những khu vực nào là không an toàn.
Vậy điều gì cho phép robot hút bụi thông minh phân biệt được nơi đã và chưa làm sạch? Câu trả lời có thể khiến nhiều người bất ngờ: “Nhờ vào kiến!”

Đường đi của robot hút bụi iRobot Roomba 980 được đánh dấu bằng ánh sáng màu tím
Thật vậy, hầu hết các robot hút bụi hiện đại ra đời dựa trên công trình nghiên cứu của Rodney Brooks, một nhà robot học đến từ Viện Công Nghệ Massachusetts (Mỹ) và là một nhà nghiên cứu côn trùng. Ông là thành viên tích cực của phong trào nghiên cứu trí tuệ nhân tạo (AI) mới nhằm thoát khỏi những vấn đề phức tạp để tập trung vào những kiến thức cơ bản của trí thông minh. Phong trào này lý giải rằng kiến vốn dĩ không thông minh, nhưng nó vẫn có những hành vi phức tạp và cách xử lý tình huống chuẩn xác.
Làm thế nào ư? Bằng cách tuân theo một bộ quy tắc đơn giản. Cụ thể, một cá thể kiến không có trí tuệ đỉnh cao, nhưng nó có một bộ quy tắc đơn giản cho phép tìm kiếm thức ăn, trở về tổ và hướng dẫn những con khác trong đàn. Tương tự như vậy, robot hút bụi không cần biết kích thước chính xác của một căn phòng để làm sạch. Thay vào đó, nó chỉ cần biết cách phản ứng trong vài tình huống khác nhau để có thể dọn dẹp cả căn phòng. Các nhà robot học gọi các quy tắc này là "hành vi” - được nêu trong hồ sơ đăng ký bằng sáng chế iRobot từ năm 2002.

Ý tưởng lập trình robot hút bụi được dựa trên trí thông minh của loài kiến
Những hành vi này cực kỳ đơn giản: hành vi "đi thẳng" yêu cầu robot tiếp tục đi thẳng cho đến khi nó va phải thứ gì đó. Hành vi "quay đầu" cho nó biết rằng khi nó va vào một thứ gì đó, nó phải dừng lại, quay sang một hướng khác và di chuyển thẳng trở lại. Hành vi "xoắn ốc" cho biết nó di chuyển ra ngoài theo hình xoắn ốc, làm sạch sàn nhà theo các vòng tròn mở rộng. Hành vi "theo sau bức tường" cho biết nó đi men theo bức tường bằng cách "lùi lại" và đi "thẳng".
Khi bạn áp dụng chúng vào robot hút bụi, các quy tắc này cho phép nó điều hướng trong phòng. Bằng sáng chế phác thảo một chuỗi hành vi điển hình:
- Khi người dùng đặt nó lên trên một chỗ bẩn, robot sẽ bắt đầu đi theo "hình xoắn ốc" cho đến khi nó va phải thứ gì đó hoặc đã bao phủ một khu vực có kích thước khá lớn.
- Nếu gặp va chạm, nó sẽ chuyển sang hành vi "men theo tường" trong một thời gian ngắn.
- Sau một khoảng cách nhất định, robot chuyển sang trạng thái "đi thẳng" ở một góc ngẫu nhiên. Theo bằng sáng chế, iRobot tính toán khoảng cách này bằng (3/4 × khoảng cách trung bình giữa các "va chạm") + (1/4 × khoảng cách gần đây nhất giữa các "va chạm").
- Máy hút bụi đi "thẳng" cho đến khi nó va chạm với vật gì đó, nó lùi lại rồi lại đi thẳng.

"Tôi không có trí tuệ đỉnh cao nhưng đủ thông minh để trở thành thứ bạn cần"
Một tập hợp các hành vi tương tự cho biết robot phải làm gì nếu bị mắc kẹt. Đầu tiên nó sẽ cố gắng tự giải thoát bằng nhiều cách (di chuyển chậm, xoay, lùi…), trước khi bỏ cuộc và bắt đầu kêu bíp thảm thiết để được giải cứu .
Chúng ta thường nghĩ robot hút bụi là những cỗ máy thông minh sử dụng tia laser để lập bản đồ căn phòng, một máy tính phức tạp để vạch đường đi. Nhưng thực sự, tương tự như loài kiến, robot hút bụi chỉ là những cỗ máy đơn giản, tuân theo một vài bản năng đã được lập trình sẵn.
- Làm thế nào để sống sót qua ngày tận thế?
- Làm thế nào để biết người đối diện bạn đang nở nụ cười giả tạo?
- Làm thế nào để biết bạn có thừa cân béo phì?
- Làm cách nào mà virus có thể nhảy từ động vật sang người?
- Làm thế nào để biết bản thân đang mắc bệnh mù màu?
- Làm thế nào mũi có thể nhận biết mùi thơm hay bốc mùi?
- Làm thế nào để hút bụi chỉ với một đoạn ống nhựa?
Khám phá
-

Tại sao linh cẩu đốm cái lại có bộ phận sinh dục của con đực? Liệu nó có phải là loài lưỡng tính không?
-

Cách phân biệt rắn cạp nong và rắn cạp nia
-
Lời giải đáp của Iraq cho các kim tự tháp cổ đại
-
Nhiễm sắc thể Y biến mất dần, dự báo đàn ông có gene giới tính mới
-
Gió mùa hạ là gì?
-

Đất hiếm thực chất hiếm đến mức nào?
Khám phá khoa học
-

Tìm thấy khoáng chất hiếm trong răng loài vật nhai đá
-
Chuyện gắn giáp vào máy bay trong thế chiến II và giả thuyết mang tên "Thiên vị sống sót"
-
Mẹo vặt thú vị giúp quần jean giữ được kiểu dáng và màu sắc ban đầu
-
Quá trình xây dựng đường hầm tàu điện ngầm lớn nhất Châu Âu chỉ trong 6 phút
-
Câu chuyện về bóng ma chó đen ở Anh
-
Những điều giúp bạn yêu đời





Tiêu điểm
-
Thú vui giải trí cực "chanh sả" trong 12 tháng của nữ giới Trung Quốc xưa
-
Người Ai Cập cổ đại ướp xác không phải để bảo quản thi thể mà vì mục đích hoàn toàn khác này
-
Người Maya, Inca, và Aztec thực sự là ai?
-
Những điều bạn chưa biết về súng AK-47
-
Sau 389 ngày ở Bắc Cực, ngốn hơn 160 triệu đô, hàng trăm nhà khoa học mang về tin dữ: Đó là gì?
-
Nhà Thanh sụp đổ, 20.000 con cháu hoàng tộc đã đổi thành họ gì để hòa nhập vào thời đại mới?
-
Phân biệt ngày 24 và ngày 25 trong lễ Giáng sinh







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video