-
 12 dấu hiệu nhận biết ma rất đơn giản nhưng có tin được không?
12 dấu hiệu nhận biết ma rất đơn giản nhưng có tin được không? Khó tin nhưng đây vẫn là 12 cách phổ biến và đơn giản nhất giúp bạn kiểm tra ngôi nhà của mình có ma hay không đấy. Cùng khám phá và áp dụng luôn tối nay nhé.
-
 Người uống rượu bị đỏ mặt nên cẩn trọng
Người uống rượu bị đỏ mặt nên cẩn trọng Đỏ mặt khi uống bia, rượu là phản ứng phổ biến ở nhiều người, nhưng theo nhóm chuyên gia Hàn Quốc thuộc Đại học Quốc gia Chungnam thì đó có thể là một dấu hiệu cảnh báo nguy cơ phát triển bệnh cao huyết áp.
-
 Ăn quả trứng cá có lợi hay có hại?
Ăn quả trứng cá có lợi hay có hại? Quả trứng cá, một loại quả gắn liền với tuổi thơ của chúng ta, hầu như ai cũng biết, nhưng có lẽ chưa nhiều người biết đến tác dụng của nó, có lợi hay có hại? Chúng ta hãy cùng nhau khám phá nhé!
-
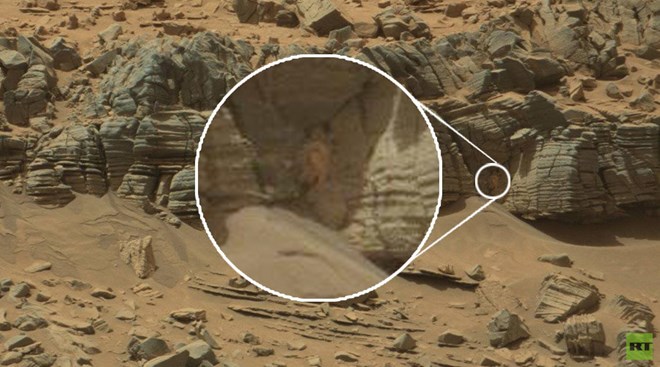 NASA phát hiện ra “người ngoài hành tinh” trên sao Hỏa?
NASA phát hiện ra “người ngoài hành tinh” trên sao Hỏa? Theo RT, những người dùng mạng xã hội ở Mỹ đã tình cờ phát hiện ra “người ngoài hành tinh” trong một bức ảnh do robot thám hiểm tự hành Curiosity của Cơ quan Hàng không vũ trụ Mỹ (NASA) chụp trên Sao Hỏa.
-
 Thomas Edison & những phát minh vĩ đại
Thomas Edison & những phát minh vĩ đại Thomas Edison là nhà khoa học, nhà sáng chế và một thương nhân đã phát minh ra rất nhiều thiết bị có ảnh hưởng tới cuộc sống của chúng ta.
-
 12 phát minh "không tưởng" của Nikola Tesla
12 phát minh "không tưởng" của Nikola Tesla "Bác học điên" Nikola Tesla đã có những ý tưởng khó tin về khoa học như: điều khiển thời tiết, khai thác năng lượng vũ trụ, điện không dây...
-
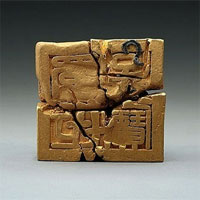 Các nhà khảo cổ phát hiện ấn triện bằng vàng nặng gần 8kg
Các nhà khảo cổ phát hiện ấn triện bằng vàng nặng gần 8kg Các nhà nghiên cứu tìm thấy ấn triện làm từ vàng nguyên chất vô cùng hiếm bị xẻ làm tư khi nhà Minh bị lật đổ cách đây gần 4 thế kỷ.
 Cơ robot nâng vật nặng gấp 50 lần trọng lượng nó Giới chuyên gia Mỹ vừa công bố phát minh mới gọi là "cơ" robot, mạnh hơn gấp 1.000 lần so với cơ bắp của con người và có thể nâng vật nặng gấp 50 lần trọng lượng của chính nó.
Cơ robot nâng vật nặng gấp 50 lần trọng lượng nó Giới chuyên gia Mỹ vừa công bố phát minh mới gọi là "cơ" robot, mạnh hơn gấp 1.000 lần so với cơ bắp của con người và có thể nâng vật nặng gấp 50 lần trọng lượng của chính nó. Thành tựu khoa học, công nghệ đóng góp cho phát triển KT-XH Nhiều kết quả nghiên cứu khoa học và ứng dụng công nghệ có đóng góp đáng kể cho sự phát triển KT-XH tại Việt Nam...
Thành tựu khoa học, công nghệ đóng góp cho phát triển KT-XH Nhiều kết quả nghiên cứu khoa học và ứng dụng công nghệ có đóng góp đáng kể cho sự phát triển KT-XH tại Việt Nam... Các loại cây làm sạch không khí trong nhà Trồng một chậu cây thường xuân, lan ý, hay trầu bà... sẽ giúp không khí trong nhà trong lành hơn rất nhiều, và bạn sẽ giảm được nguy cơ mắc bệnh ung thư. Mời các bạn tham khảo các cây trồng trong nhà tốt cho sức khỏe dưới đây
Các loại cây làm sạch không khí trong nhà Trồng một chậu cây thường xuân, lan ý, hay trầu bà... sẽ giúp không khí trong nhà trong lành hơn rất nhiều, và bạn sẽ giảm được nguy cơ mắc bệnh ung thư. Mời các bạn tham khảo các cây trồng trong nhà tốt cho sức khỏe dưới đây Khoa học quân sự
Khoa học quân sự  Tại sao
Tại sao  Địa danh nổi tiếng
Địa danh nổi tiếng  Bệnh và thông tin bệnh
Bệnh và thông tin bệnh  Virus Covid 19
Virus Covid 19