Loài sóc trở thành hình mẫu để quân đội Mỹ học hỏi nhằm thiết kế robot trong tương lai
Tại Đại học California, Berkeley, các nhà khoa học đang mở đường cho những robot tương lai của Quân đội Hoa Kỳ, có thể tự động di chuyển qua địa hình gồ ghề một cách dễ dàng, nhờ vào nghiên cứu mới được thực hiện dựa trên loài động vật mà ai cũng biết: sóc.

Trên thực tế, sóc rất giỏi trong việc “đọc” các chướng ngại vật.
Cụ thể, họ đang nghiên cứu sóc cáo (fox squirrel) trong nỗ lực tìm hiểu lý do tại sao chúng lại rất giỏi trong việc thực hiện những bước nhảy nguy hiểm để đạt được những món ăn ngon. Theo trang Army, trên thực tế, sóc rất giỏi trong việc “đọc” các chướng ngại vật và so sánh với những giới hạn về thể chất của chúng, đến nỗi chúng hầu như không bao giờ bị ngã.
Chất lượng đó hoàn toàn vượt trội so với robot. Có một điều robot làm khá tốt, chính là bị ngã và mắc kẹt. Vì vậy, một cách tiếp cận lấy cảm hứng từ sinh học — sử dụng loài sóc làm nghiên cứu — có thể giúp quân đội và robot tìm kiếm cứu hộ hoạt động cả trên những địa hình không bằng phẳng nhất.
Trong khi quân đội Mỹ đã triển khai một loạt các drone trong hai thập kỷ qua, thì sự phát triển của những robot trên mặt đất đã bị chậm lại. Không giống như drone, hiếm khi cần phải vượt qua chướng ngại vật hoặc các tình huống khó di chuyển, robot mặt đất phải hoạt động trong một môi trường phức tạp hơn.
Robot mặt đất có thể đối mặt với một loạt chướng ngại vật, một số có thể điều hướng qua được và một số thì không. Ví dụ, việc quyết định xem có thể trèo lên một đống đá hay nhảy qua rãnh hay không, là những loại câu hỏi khó mà bộ não robot phải có thể trả lời nhanh khi hoạt động thực địa.

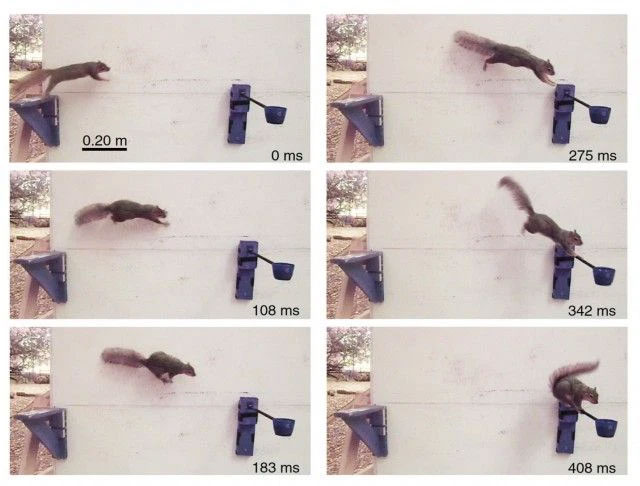
Các nhà nghiên cứu đã nghiên cứu loài sóc hoang dã, dụ chúng nhảy lên để ăn.
Hiểu được các quyết định trong tích tắc mà sóc đưa ra khi chúng nhảy từ cành này sang cành khác sẽ giúp các nhà khoa học phát triển các robot nhanh nhẹn hơn, theo Quân đội Hoa Kỳ
Trong nhiều thập kỷ, các nhà chế tạo robot đã nghiên cứu những sinh vật khác, chẳng hạn như tắc kè và gián, trong nhiệm vụ chế tạo những con robot nhanh nhẹn có thể chinh phục những tình huống khó khăn. Nhưng giờ đây, trọng tâm đã chuyển sang một vấn đề thậm chí còn khó hơn: tạo ra robot có thể học cách đưa ra quyết định chuyển động trong tích tắc dựa trên những hạn chế cơ học của chính chúng.
Và những con sóc chính là chìa khóa. Trong một lùm cây bạch đàn trong khuôn viên đại học California, là một phần của dự án được tài trợ bởi Quân đội Hoa Kỳ, Quỹ Khoa học Quốc gia và Viện Y tế Quốc gia, các nhà nghiên cứu đã nghiên cứu loài sóc hoang dã, dụ chúng nhảy lên để ăn.
Sóc sở hữu khả năng đánh giá một chướng ngại vật đáng kinh ngạc với sự nhanh nhẹn của chúng. Chúng có thể xem xét một vấn đề — chẳng hạn như cách lấy một hạt đậu phộng lơ lửng trên mặt đất — và xác định xem một hành động, chẳng hạn như nhảy từ khúc gỗ sang món ăn, có thành công hay không.
Can "squirrelly" skills be built into robots?
Sóc không phải lúc nào cũng hoàn hảo trong việc đánh giá một bước nhảy, nhưng chúng không bao giờ gặp thất bại thảm hại. Mặc dù chúng có thể tạm dừng để đánh giá và thậm chí thực hiện một vài lần khởi động sai, nhưng những con sóc không bao giờ thực sự ngã trong khi thực hiện cú nhảy. Trong trường hợp xấu nhất, chúng cũng có thể sử dụng móng vuốt của mình để bám chặt vào cây.
Dean Culver, giám đốc chương trình Động lực học và Hệ thống phức hợp tại Bộ Tư lệnh Phát triển Khả năng Chiến đấu của Quân đội Mỹ, cho biết:
“Chiến trường, đặc biệt là chiến trường của tương lai, là một nơi không thể đoán trước. Nếu chúng ta muốn các nền tảng robot có thể đi đến bất cứ nơi nào mà chiến sĩ đến và hơn thế nữa, thì các nền tảng này sẽ yêu cầu khả năng ra quyết định nhanh chóng, sáng tạo với chi phí năng lượng thấp. Giống như việc quyết định xem có nên vượt qua hay đi vòng qua chướng ngại vật hay không”.
Công việc này cũng có thể giúp robot tự động đưa ra quyết định tốt hơn trong thời gian thực, Culver nói. “Bằng cách nghiên cứu cách các sinh vật, chẳng hạn như loài sóc, quyết định cách nhảy và hạ cánh để đạt được mục tiêu của chúng, chúng ta có thể tìm hiểu thêm về cách các hệ thống được thiết kế trong tương lai đưa ra quyết định và hành động để phản ứng với các tình huống mà chúng chưa được đào tạo.”
Sóc có thể đánh giá các chướng ngại vật để tính toán các cú nhảy thành công gần như mọi lúc.
Sóc có thể đánh giá các chướng ngại vật, khả năng của bản thân và môi trường của chúng để tính toán các cú nhảy thành công gần như mọi lúc. Ngay cả khi chúng thất bại, biên độ sai sót đủ nhỏ để những móng vuốt sắc nhọn của chúng cho phép chúng bám lại mà không bị thương.
Các nhà khoa học tại Berkeley cũng đang xem xét công việc của họ có thể mang lại lợi ích như thế nào cho các robot tìm kiếm và cứu hộ. Robot đi vào các tòa nhà bị sập, mặt đất nứt vỡ do động đất, hoặc các khu vực thiên tai khác sẽ gặp rất nhiều chướng ngại vật trên đường đi của chúng. “Các nguyên tắc tương tự áp dụng cho một robot trong chiến trường trong tương lai cũng áp dụng cho các robot trong tìm kiếm và cứu nạn,” Culver nói, “ngoại trừ nhiệm vụ của chúng được chỉ định, môi trường vẫn không thể đoán trước, và những robot đó sẽ đòi hỏi khả năng thích ứng tương tự."

Hành vi của sóc có thể một ngày nào đó giúp những robot như thế này trở nên linh hoạt hơn
Chiến trường và vùng thiên tai là một nơi nguy hiểm, đầy chướng ngại vật. Các robot của quân đội trong tương lai có thể trông không giống sóc, và chúng chắc chắn sẽ không nhảy tưng lên để vồ lấy hạt đậu phộng, nhưng khả năng tự ra quyết của robot một ngày nào đó có thể được mô phỏng theo loài gặm nhấm bé nhỏ này.
- Mô hình có khả năng dự đoán tình trạng san hô trong tương lai
- Tảo sẽ trở thành nguồn nhiên liệu hyđrô chủ chốt trong tương lai
- Thành tựu y học nào sẽ đến trong tương lai?
- Xe Van chạy điện với thiết kế từ tương lai
- Thử cho robot đánh để đảm bảo sự an toàn cho loài người trong tương lai
- 10 mẫu xe được thiết kế cho tương lai
- Nga "vô tình để lộ" thiết kế vũ khí tương lai
Khám phá
-

Vừa tìm ra mỏ đất hiếm "trời cho", đủ để thế giới dùng trong 1.000 năm: Nước nào may mắn sở hữu?
-
Tại sao con chip lại là một trong những thứ khó sản xuất thế thế giới?
-

Tại sao da môi lại không giống với các vùng da khác?
-
Đây là lý do vì sao càng lớn ta càng thấy thời gian trôi qua nhanh chóng mặt
-

Ngôi làng Bát Quái Chu Cát và "Bát Trận đồ" của Khổng Minh
-

Mũ của binh lính xưa luôn có phần đỉnh nhọn, chuyên gia: Công dụng quả thực rất thần kỳ!
Thế giới động vật
-

Lần đầu tiên phát hiện báo hồng
-
Sẽ không còn những bộ lông sặc sỡ óng mượt, loài chim đang dần trở nên "nhạt nhòa" theo đúng nghĩa đen
-
Cận cảnh loài ếch được đặt theo tên Thái tử Anh
-
Lần thứ hai hổ Đông Dương đẻ thành công trong điều kiện nuôi
-
Cảnh báo đỏ từ đàn voi
-
Tại sao rái cá biển nắm tay nhau khi ngủ?






Tiêu điểm
-
Lửng mật - trùm giang hồ đồng cỏ, vua cà khịa, ông hoàng liều lĩnh, chúa tể "bất cần đời"!
-
Cách phân biệt rắn hổ mang chúa, hổ mang thường và hổ trâu
-
Chuột khổng lồ ung dung giữa đàn cá sấu: Tự tin không bị kẻ săn mồi thịt bởi các khả năng đặc biệt này!
-
Tổng hợp các loài cá nước ngọt phổ biến tại Việt Nam bạn nên biết
-
Cách phân biệt rắn cạp nong và rắn cạp nia
-
13 loài vật thông minh nhất hành tinh
-
Những loài rắn độc ở Việt Nam







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video

