Hệ thống điều khiển góc quay thân xe và mô-men động cơ
Vào năm 1992, nhiều chuyên gia đã đưa ra khái niệm “Điều khiển góc quay thân xe” như là một công nghệ mới để nâng cao tính động lực học ôtô bằng cách điều khiển sự phân chia mô-men quay vòng cho các bánh xe trên cầu chủ động.
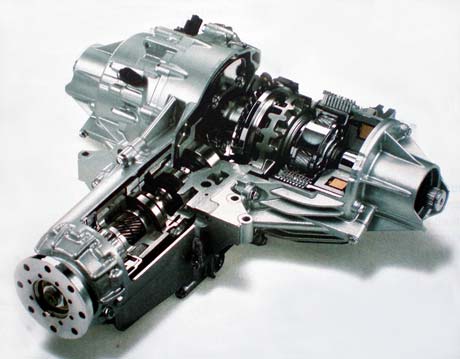
Hình 1: Kết cấu
Năm 1996, Honda đã bổ sung thêm góc quay thân xe còn có thể điều khiển sự phân chia mô-men quay vòng cho các bánh xe trên cầu dẫn hướng cho xe hai cầu. Cái được gọi là “Hệ thống chuyển đổi mô-men tích cực” (Active Torque Tranfer System - ATTS) được sử dụng trong dòng xe Honda Prelude.
Đến năm 2004, Honda đã phát triển hệ thống DYC AWD đồng thời điều khiển phân chia mô-men giữa tất cả các bánh xe trên các cầu. Hệ thống này được sản xuất với tên gọi là SH-AWD và sử dụng cho xe Honda Legend tại thị trường Mỹ. Gần đây hộp số mới của ôtô, “Torque Vectoring” (điều khiển mômen), là hộp số chủ động điều khiển mô-men nhằm nâng cao sức kéo của động cơ và tính năng động lực học ôtô. Honda đưa ra hệ thống kết hợp hai công nghệ này gọi là “Hệ thống điều khiển kết hợp giữa góc quay thân xe và mô-men động cơ” (DYC Torque Vectoring).
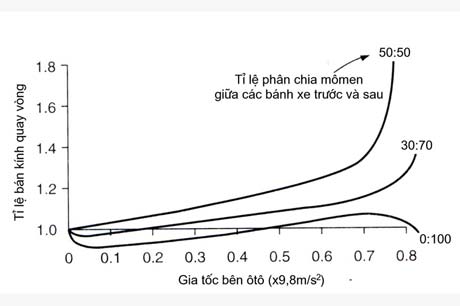
Hình 2
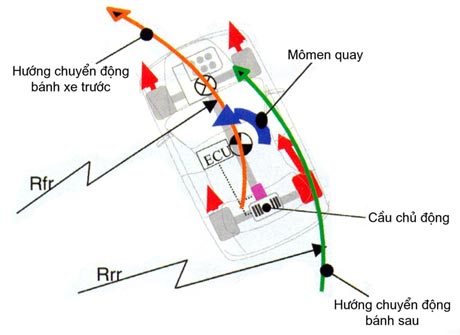
Mômen từ động cơ đến các bánh xe có ảnh hưởng rất lớn đến hiệu quả quay vòng ôtô. Khi mô-men tác động lên cầu sau tăng (70%) hiện tượng tự trả lái có thể xảy ra. Điều này cho thấy rằng hiệu quả quay vòng của ôtô đang tăng tốc sẽ thay đổi theo tỉ lệ phân chia mô-men giữa các cầu. Nếu tỉ lệ mô-men phân chia giữa hai cầu được điều chỉnh nhiều đi nữa thì cũng không thể thay đổi hiệu quả sự tăng gia tốc bên, và làm giảm bán kính quay vòng nhỏ nhất một cách rõ nét, như vậy ôtô không thể quay vòng tốt với tốc độ không đổi mà không có sự điều chỉnh mô-men giữa hai bên bánh xe. Điều đó được minh chứng trên đồ thị (hình 2).
Sự thay đổi tỉ lệ thay đổi giá trị mô-men giữa các bánh xe hai bên của một cầu xe không chỉ làm thay đổi đặc tính quay vòng mà còn tăng gia tốc bên của ôtô. Dựa vào giá trị góc lệch bên thân xe tại tọa độ trọng tâm ôtô (bê-ta), các chuyên gia đưa ra phương pháp kiểm soát mô-men quay của ôtô trong các điều kiện lái. Điều này được sử dụng trong hệ thống DYC Torque Vectoring dựa trên các đặc tính động lực học ôtô (gọi là phương pháp hiệu chỉnh bê-ta).
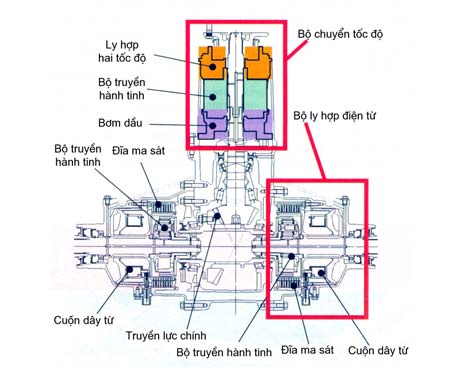
Hình 3: Sơ đồ nguyên lý hoạt động
Hệ thống SH-AWD cho phép điều khiển mô-men tại các bánh xe ở các điều kiện quay vòng bằng cách sử dụng các bộ truyền: một bộ truyền dùng để gia tốc tăng tốc độ cầu sau chủ động hơn cầu trước khoảng 5% khi quay vòng. Trên hình 3 sơ đồ bố trí hệ thống SH-AWD trên ôtô và hình mặt cắt ngang cầu sau.
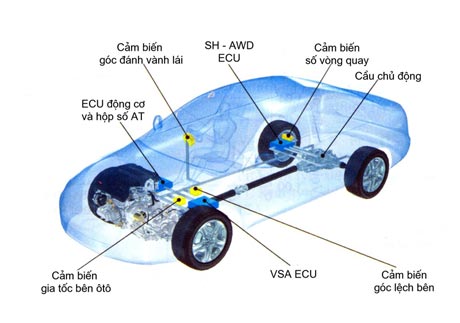
Hình 4: Sơ đồ bố trí hệ thống
Bộ truyền này đặt trước cầu sau có 2 cấp tốc độ: thấp và cao nhằm tăng số vòng quay của trục chủ động cầu sau, bộ truyền răng hypoid truyển số vòng quay từ trục các-đăng tới hai bộ vi sai ở hai bánh xe hai bên, hai ly hợp điện từ ở hai bên bán trục, một cuộn dây điện từ khác đặt trong ly hợp để nhận biết từ trường nhằm bù lực từ trường khi khe hở ly hợp thay đổi trong quá trình quá độ hoạt động.
Hình 5
Kết quả thử nghiệm hệ thống DYC Torque Vectoring với xe thực tế đã tạo nên các hiệu quả sau:
1. Trong điều kiện lái bình thường và đặc biệt, DYC Torque Vectoring tham gia điều khiển mô-men quay ôtô từ điều kiện lái bình thường đến giới hạn.
2. Điều khiển phân chia mô-men lên các bánh xe trái - phải để hạn chế gia tốc bên khi quay vòng đảm bảo mô-men tại các bánh xe tương ứng với tải trọng. Điều này làm tăng tổng các lực tại bánh xe khi quay vòng.
3. Điều khiển mô-men quay sao cho chuyển động luôn nằm ở trạng thái cân bằng lực quay vòng giữa các bánh xe trước và sau là rât cần thiết. Lực sẽ giảm xuống ở bánh xe trước và tăng ở bánh xe sau. Do đó, hạn chế được tình trạng quay vòng thiếu.
Đồng thời SH-AWD là hệ thống kết nối giữa hai bộ vi sai bánh xe nhằm giảm hiện tượng quay vòng thừa mà không làm ảnh hưởng đến tính ổn định ôtô. Kết quả là ôtô có khả năng quay vòng ổn định với bán kính quay thích hợp.
ThS: Trương Đặng Việt Thắng
Ứng dụng khoa học
-

Robot NASA liên tục bắt được “tín hiệu sự sống không mong đợi"
-

Tìm ra công nghệ pin vĩnh cửu không gây ô nhiễm
-

Lý do bên trong máy bay lúc nào cũng lạnh
-

Top 7 khoảnh khắc bí ẩn đáng sợ nhất chờ con người giải mã
-

Con người sẽ mất bao lâu để du hành đến sao Mộc?
-

Kỳ lạ cô gái 18 tuổi ở Trung Quốc mắc bệnh "luyến ái não"





Tiêu điểm
-

Hồ nước kỳ lạ chứa hàng triệu tấn "vàng đen", khai thác 200 năm cũng chưa hết
-
Lũ ống là gì? Lũ ống thường xảy ra ở đâu, khi nào?
-
Kỳ lạ cô gái 18 tuổi ở Trung Quốc mắc bệnh "luyến ái não"
-
Ma túy "nước biển" là gì?
-
Kỹ thuật trồng và chăm sóc cây sung cảnh ra quả
-
Giải mã căn bệnh kỳ lạ của vua Anh Henry
-
Những thói quen tưởng tốt nhưng hại sức khỏe







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video