Từ lòng trái đất đến mặt trăng
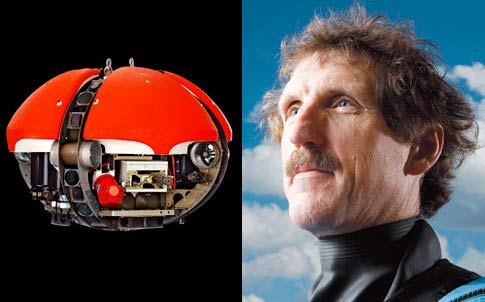
Có lẽ trên đời này không ai kỳ quặc như Bill Stone: Thám hiểm những hang động sâu nhất trái đất để tập luyện và chuẩn bị cho việc du hành vào vũ trụ.
Stone không phải là phi hành gia, ông là nhà thám hiểm hang động đã từng thám hiểm các hang động sâu và nguy hiểm nhất trên Trái đất. Ông muốn chứng minh rằng hang động là nơi huấn luyện tốt nhất cho việc thám hiểm vũ trụ.
Robot DepthX
Với khoản ngân sách hỗ trợ 5 triệu USD của NASA, Stone đang phát triển một robot mang tên DepthX, có thể trở thành loại xe tự hành dưới nước tân tiến nhất từ xưa đến nay. DepthX là một robot thám hiểm hang động, có khả năng định hướng và di chuyển trong điều kiện chật hẹp và nhiều trở ngại. Nhiệm vụ của DepthX trên lý thuyết là tìm kiếm cuộc sống trên mặt trăng Europa của sao Thổ. Thậm chí cả Stone cũng không dám tin vào nhiệm vụ hầu như bất khả thi này.
Trong tháng này, DepthX sẽ được thử nghiệm tại hiện trường lần đầu, ở hang động sâu nhất thế giới Zacatón Cenote thuộc Mexico. Để đạt được tham vọng chinh phục vũ trụ, Stone cần phải gây được ấn tượng mạnh với những nhà đầu tư giàu có, quan tâm đến ngành vũ trụ không gian. Do vậy, thử nghiệm lần này phải thật hoành tráng và thành công. Hơn nữa, ở tuổi 54, Stone không còn nhiều thời gian.
Thử so sánh DepthX với hai xe tự hành đang thám hiểm sao Hoả hiện nay là Spirit và Opportunity, ta sẽ thấy nhiệm vụ khó khăn của nhóm Stone. Mặc dù đang rất thành công trong việc thu thập dữ liệu và hình ảnh, hai xe tự hành này vẫn là những phương tiện điều khiển từ xa cực kỳ tinh vi. Những nhân viên điều khiển từ mặt đất sẽ ra lệnh cho Spirit và Opportunity di chuyển căn cứ vào những hình ảnh quang cảnh xung quanh được gửi về. Trong khi đó DepthX là xe tự hành hoàn toàn. Nó sẽ được thả vào một môi trường mới, và phải tự hình dung ra nó đang ở đâu, phải đi đâu và phải làm gì.
 |
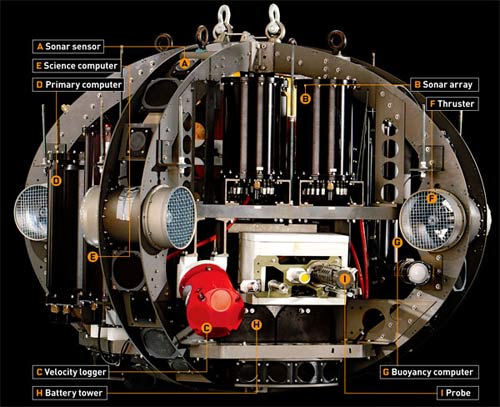
Rất nhiều công nghệ khác nhau được kết hợp để tạo nên chiếc xe tự hành DepthX có khả năng vẽ bản đồ và phát hiện sự sống. (Ảnh: Popsci) |
Về căn bản, DepthX là một quả cầu khổng lồ. Được vũ trang bằng 54 bộ cảm biến siêu âm, DepthX sẽ thu thập dữ liệu từ hàng ngàn va chạm của sóng siêu âm mỗi phút để tạo thành một bức tranh chi tiết về môi trường xung quanh. DepthX không chỉ vẽ bản đồ ba chiều của quang cảnh xung quanh mà còn xác định được vị trí của nó trong môi trường này, bằng cách sử dụng một bộ phận hướng dẫn quán tính, dụng cụ đo gia tốc, máy đo độ sâu và các bộ cảm biến khác để định vị. Tất cả những thiết bị này hợp thành bộ phận Định vị và vẽ bản đồ đồng bộ (Simultaneous Localization and Mapping - SLAM).
Đây là lần thử nghiệm đầu tiên của SLAM ba chiều. Các loại xe tự hành hiện nay có tầm nhìn tương đối hẹp và chỉ nhìn được phía trước. DepthX là robot thám hiểm hang động, có thể gặp chướng ngại vật từ bất cứ hướng nào, nên phải có góc nhìn toàn diện.
Ước mơ
Ngay từ bé, Stone đã ước mơ được bay vào vũ trụ. Năm 1989, Stone lọt vào nhóm 60 người cuối cùng trong số 10.000 người nộp đơn thi tuyển vào đội phi hành gia của NASA.
Ở tất cả các bài thi về thể chất, tâm lý và cảm xúc, Stone đều đứng đầu. Sau đó, ông được gọi vào phỏng vấn trước một hội đồng các cựu phi hành gia. Khi Guy Bluford hỏi ông có điều gì hối tiếc trong cuộc đời không, Stone trả lời: "Tôi muốn có 2 tỉ USD để đưa một đội thám hiểm tư nhân lên Mặt trăng".
Trong thời gian 10 năm trở lại đây, Stone trở thành một người uyên bác về vũ trụ. Công việc hàng ngày của ông là chuyên viên tự động học của Viện Tiêu chuẩn và công nghệ quốc gia. Lúc rảnh rỗi, ông viết các bài báo khoa học như thiết bị hỗ trợ cuộc sống, động cơ đẩy phản lực và thiết kế tàu vũ trụ. Thiên tài kỹ thuật và sự đam mê vũ trụ của ông được nhiều người biết đến. Năm 1982, ông được mời vào một hội đồng của quốc hội để duyệt xét các dự án trạm không gian hiện có, và sau đó là một uỷ ban của chính quyền liên bang để thiết kế một trạm vũ trụ riêng.
 |
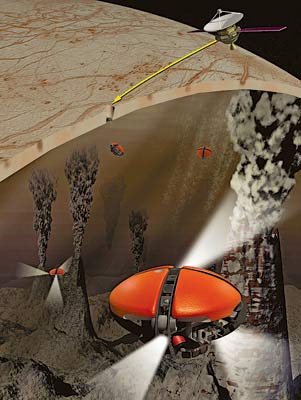
Trang bị bằng 54 bộ cảm ứng siêu âm, xe tự hành của Bill Stone là quả cầu khổng lồ có thể lập được bản đồ 3-D quang cảnh xung quanh. Có thể ngày nào đó một robot tương tự sẽ tìm kiếm cuộc sống ngoài trái đất ở những hố sâu băng giá của Europa, một mặt trăng của sao Thổ. |
Tuy nhiên, bất chấp kiến thức uyên bác của mình, ý kiến của Stone trước hội đồng phi hành gia đã thể hiện sự kiêu căng và thiếu kiềm chế. Don Puddy, một chuyên viên cao cấp của Trung tâm vũ trụ Johnson khẳng định với Stone: "Khó có khả năng nào NASA trở lại Mặt trăng lần nữa".
Stone cảm thấy mọi hy vọng và ước mơ bao năm nay sụp đổ. Ông bị cho nghỉ việc và chẳng lấy gì làm bực bội. Ông cho rằng bộ phận thám hiểm của cơ quan này thiếu can đảm. Cùng với sự giúp đỡ của một số nhà khoa học tại NASA, ông tự mình tìm cách đóng góp cho sự khám phá những miền đất xa lạ.
Hành tinh Europa
Kể từ khi phi thuyền Voyage 1 bay quanh quỹ đạo sao Mộc năm 1979, các nhà khoa học đã tin rằng một trong những Mặt trăng của hành tinh này có nước, và có thể có sự sống. Mặc dù Europa rất lạnh (-2600F bề mặt), và bao quanh bằng một lớp băng dày hơn 10km, những nhà sinh vật học vũ trụ vẫn cho rằng bên dưới đó là một biển với lượng nước lớn hơn tổng lượng nước ở các đại dương Trái đất. Europa được xem là nơi có khả năng có sự sống nhất trong thái dương hệ. DepthX là một cách để chứng minh điều này.
Mặc dù không có kế hoạch chính thức đổ bộ vào Europa, NASA vẫn phác thảo một kế hoạch tàu không gian gồm ba giai đoạn. Giai đoạn một, tàu sẽ đổ bộ lên bề mặt Europa và ở giai đoạn hai, một robot có hình dạng như một quả lắc sẽ được thả ra. Robot này có một lò phản ứng hạt nhân tạo nhiệt ở đầu, sẽ làm tan lớp băng dày để xuống dưới đáy đại dương. Ở giai đoạn ba, một hoặc nhiều robot giống như DepthX sẽ được thả ra.
Từ đây, DepthX sẽ thực hiện những chuyến thám hiểm thận trọng, mỗi lần vài trăm mét, lập bản đồ của môi trường xung quanh và sử dụng các hệ thống giám sát bằng hình ảnh và hoá chất để truy tìm dấu vết của sự sống. Theo định kỳ, DepthX sẽ trở lại robot quả lắc để truyền về Trái đất những thông tin đã thu thập được.
Nếu thử nghiệm của DepthX thành công, Stone sẽ đạt được mục tiêu thu hút số tiền tài trợ tư nhân 100 triệu USD để thiết kế một robot khác, có thể đổ bộ xuống Mặt trăng của Trái đất để tìm dấu hiệu của nước. Nếu lớp băng trên Mặt trăng đủ dày, Stone sẽ tiến đến gần hơn mục tiêu cuối cùng của ông là tự mình đến miệng núi lửa Shackleton, nằm ngay giữa cực nam của Mặt trăng.
Từ hố sâu đến bầu trời

Miệng núi lửa Shackleton sâu khoảng hơn 1km, và chiều ngang khoảng hơn 10km, phần lớn chìm trong bóng tối vĩnh cửu. Các sao chổi băng thường va chạm với Mặt trăng và trong đáy sâu của Shackleton có thể tích tụ hàng lớp băng dày.
Trong vũ trụ, băng còn quý hơn vàng. Các nhà khoa học có thể làm tan băng để lấy nước uống, trích xuất oxy để thở và dùng oxy kết hợp với hydro làm nhiên liệu cho tên lửa. Stone còn muốn đi xa hơn. Theo ông tính toán, có thể vận chuyển băng từ Mặt trăng về các trạm vũ trụ ngoài quỹ đạo Trái đất để bán.
Trở ngại lớn nhất của du hành không gian là phải tốn một khối lượng nhiên liệu khổng lồ để thoát khỏi lực hút của Trái đất. Nhưng nếu thiết lập được trạm nhiên liệu trên Mặt trăng, chi phí đưa tàu không gian vào vũ trụ có thể giảm đi 75%. Stone ước tính rằng chỉ trong vài năm, căn cứ trên Mặt trăng có thể đạt doanh thu 1 tỉ USD mỗi năm.
Để trang bị cho những chuyến thám hiểm hang động của mình, Stone đã tập trung được những nhóm đồng chí hơn 100 người và đã tìm được những khoản tài trợ hàng triệu USD. Để có thể sống sót được nhiều tuần lễ trong những môi trường nguy hiểm, xa lạ, và thường thiếu không khí, Stone phải đối đầu với những thử thách gần giống như các phi hành gia vũ trụ và đã chế tạo được những thiết bị phức tạp hỗ trợ cho công việc thám hiểm.
Vì những hang động dưới lòng đất thường bị ngập nước, Stone đã thiết kế một loại bình hơi có thể tái chế khí carbonic thở ra để sử dụng lại, giúp người thợ lặn có thể sống hơn 24 giờ dưới nước. Loại bình hơi này hoàn toàn có thể được điều chỉnh để sử dụng ngoài vũ trụ. Có những hang động lại không hề có một chút nước nào. Stone đang chế tạo một loại thiết bị để có thể tái chế nước tiểu thành nước uống được, một thứ rất hữu ích khi đổ bộ lên Shackleton lần đầu.
Trong hang động cũng như trên Mặt trăng, không thể trông chờ vào sự giúp đỡ của bên ngoài. Người thám hiểm phải tự mình xoay xở. Những điều Stone thu thập được từ các cuộc thám hiểm hang động không thể hiện những gì ông sẽ làm mà là cách thức ông sẽ làm điều này.
Mặc dù NASA đã từ chối mọi đề nghị của ông, Stone vẫn không nản chí. Ông hy vọng những nhà đầu tư tư nhân sẽ sẵn sàng móc hầu bao tài trợ cho dự án của ông. Cơ may của ông thật ra còn thấp hơn khả năng trúng xổ số Powerball của Mỹ, nhưng ông vẫn hy vọng một ngày nào đó, sẽ đủ tiền đưa một phi hành đoàn 12 - 18 người lên Mặt trăng xây căn cứ.
NASA hy vọng dùng một robot tương tự DepthX để thám hiểm Europa, một mặt trăng băng giá thuộc sao Thổ. Những nhà sinh vật học vũ trụ từ lâu nay vẫn nghi ngờ rằng mặt trăng băng giá Europa có nước ở thể lỏng - và có khả năng là nơi ngoài trái đất có sự sống. Một robot như DepthX có thể được phóng vào vũ trụ trên con tàu thăm dò, đáp xuống bề mặt băng giá của Europa trong một trạm căn cứ có hình dạng viên đạn và có khả năng tạo nhiệt, sau đó sẽ được thả vào trong làn nước băng giá, bí hiểm bên dưới. Một hoặc nhiều robot như thế sẽ đủ thông minh để quyết định hướng đi nhằm tối đa hóa cơ hội phát hiện sự sống.
|
DepthX thử nghiệm tính linh hoạt của một xe tự hành hoàn toàn dưới nước, có thể di chuyển trong môi trường chật hẹp như hang động. Khi hoàn tất, DepthX không cần được điều khiển từ xa hoặc lập trình trước, nó sẽ đánh giá môi trường xung quanh theo thời gian thực bằng cách sử dụng 54 bộ cảm ứng siêu âm (A) do các bộ phát sóng siêu âm (B) điều khiển, cùng với một bộ phận hướng dẫn quán tính, thiết bị đo gia tốc và các thiết bị đo độ sâu. Một thiết bị ghi nhận tốc độ Doppler (C) theo dõi tốc độ di chuyển của xe. Thông tin này được chuyển cho các máy tính (D và E), từ đó robot sẽ vẽ được bản đồ 3-D của môi trường xung quanh và quyết định hướng đi kế tiếp. Để tránh những điểm mù, các bộ cảm ứng được đặt khắp bề mặt của robot đa hướng hình tròn này. Khi xác định được hướng đi, DepthX sẽ di chuyển đến bằng cách sử dụng 6 động cơ đẩy (F) để di chuyển, lơ lửng và tìm đường một cách chính xác. Hệ thống này tuân theo nguyên tắc dư thừa - có hai động cơ đẩy dọc và bốn động cơ đẩy ngang. Nếu có một động cơ không hoạt động, cái còn lại sẽ thay thế. Một máy tính nổi (G) kiểm soát bộ van, bơm và khí nén để đẩy nước ra khỏi hệ thống. Mục đích là để đạt được độ nổi cân bằng và tránh phí phạm năng lượng đẩy. Hai tháp pin (H) (cũng theo nguyên tắc dư thừa, đề phòng một tháp bị hỏng), được tạo ra từ các khối pin lithium-ion với năng lượng có thể vận hành 30 chiếc xe hơi chạy điện.
|
Lê Thảo
Sự kiện
-

Top 10 loài động vật kỳ lạ hiện còn sinh sống trên Trái đất
-

Tại sao ánh sáng bị bẻ cong bởi trọng lực?
-

Xe thăm dò của NASA trên sao Hỏa gửi về hình ảnh gây bất ngờ
-

Vẻ đẹp rực lửa của loài rắn đào hang chỉ còn 3 cá thể duy nhất
-

Tại sao các hành tinh lại bị treo lơ lửng trong vũ trụ?
-

Trung Quốc phát triển giống lúa lai kỳ lạ: Gieo trồng một lần thu hoạch trong nhiều năm
Câu chuyện khoa học
-

Jeff Bezos - "Ông trùm" lĩnh vực bán hàng trực tuyến
-
Những người mù khiến người sáng mắt kính nể
-
Các yếu tố môi trường có thể đẩy nhanh quá trình tuyệt chủng
-
Ai làm "méo" thông tin về biên giới lãnh thổ Việt Nam?
-
Người tính được số Pi 5 nghìn tỉ chữ số
-
Bán giải Nobel lấy tiền tài trợ nghiên cứu khoa học




Tiêu điểm
-
Carl Gauss: Hoàng tử toán học giải bài toán cổ có lịch sử hơn 2000 năm chỉ trong một đêm
-
10 đệ nhất quân sư của Trung Hoa cổ đại
-
Acsimet - nhà bác học vĩ đại của Hy Lạp cổ
-
Chân dung thiên tài toán học người Nga Gtigori Perelman: Được mệnh danh là người thông minh nhất thế giới
-
Albert Einstein và 24 câu nói truyền cảm hứng cho thế hệ trẻ
-
GS Ngô Bảo Châu và bổ đề Langlands
-
Những thiên tài tự học "đỉnh" nhất mọi thời đại







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video