Robot lặn “tự lên kế hoạch thí nghiệm”
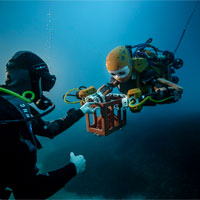
Các nhà khoa học Mỹ đang sử dụng một thiết bị lặn có khả năng “tự thiết lập các thí nghiệm” dưới đáy biển. Gulper AUV được lập trình để tìm kiếm thông tin mà các nhà khoa học muốn và tự lên lộ trình cho mình, tránh các dòng nước và chướng ngại nguy hiểm.

Thiết bị lặn ra đi, trở về và các dữ liệu được tải xuống - Ảnh: BBC
Tại hội nghị khoa học đại dương ở Portland, nhóm nghiên cứu đã giải thích làm thế nào để “huấn luyện” robot tự biết mang kết quả nghiên cứu tốt nhất lên mặt nước. Thom Maughan - thuộc Viện Nghiên cứu Monterey Bay Aquarium (MBARI) ở California, một trong các kỹ sư của dự án - cho biết Gulper AUV sử dụng phần mềm “T rex”, giống như phần mềm xe tự hành trên sao Hỏa của NASA để tránh các chướng ngại trên bề mặt hành tinh đỏ này.
Khác biệt chính giữa hai phần mềm này là đối với xe tự hành trên sao Hỏa, phần mềm hoạt động tại trung tâm kiểm soát ở Trái đất. Còn với thiết bị lặn, phần mềm hoạt động trên chính thiết bị. “Bạn có thể nói với nó những gì nó phải làm trước khi đưa nó xuống nước" - tiến sĩ Maughan nói - Chúng tôi nói với nó: “Đây là các nhiệm vụ chúng tôi muốn bạn thực hiện”, rồi nó xuất phát và đánh giá những gì đang xảy ra dưới đại dương, tự quyết định sẽ trải qua một đoạn đường dài cỡ nào để thu thập dữ liệu chúng tôi muốn”. Các nhà nghiên cứu tại MBARI sử dụng Gulper AUV để kiểm soát hoa rong biển có hại.
Kim Fulton - Bennett thuộc MBARI giải thích: ”Trước đây, cứ vài tuần chúng tôi thường đi trên tàu suốt một ngày để dùng tay thực hiện các đo lường. Nay chúng tôi chỉ đưa Gulper AUV ra phía ngoài cảng và cho nó lặn xuống rồi tự di chuyển. Khoảng 24 giờ sau nó trở về, chúng tôi kéo lên boong và tải các dữ liệu xuống”.
Công nghệ
-
Mặt trời còn có thể cháy trong 5 tỷ năm, tại sao loài người chỉ còn 1 tỷ năm nữa?
-
Khoảnh khắc mô phỏng tàu ngầm Titan nổ tung trong tích tắc
-
2 bí mật về chai nhựa đựng nước mà nhiều người sẽ ước rằng "thà mình không biết"
-
Ông chủ SpaceX Elon Musk tiết lộ phi thuyền vũ trụ và UFO thách thức vật lý?
-
Người được phong giáo sư khi tròn 30 tuổi, là viện trưởng trẻ tuổi nhất trong lịch sử khoa học Việt Nam!
-

Việt Nam có một loại cây lạ có thể uống trực tiếp từ thân cây, dễ gây nghiện
Công nghệ mới
-

Vật liệu polymer đầu tiên trên thế giới có thể tự di chuyển được bằng ánh sáng
-
Mỹ đang sản xuất hàng ngàn áo tàng hình
-
Xe hơi biết lọc mùi hôi bên ngoài
-
Robot giao nhiệm vụ cho con người
-
Trung Quốc phát triển sạc không dây cấy trong cơ thể người
-
Công nghệ robot giúp xử lý thông tin và lái xe tự động



Tiêu điểm
-
Top 10 mẫu xe lưỡng cư ấn tượng nhất trên thế giới
-
Nam sinh 17 tuổi thiết kế động cơ có khả năng biến đổi ngành công nghiệp ôtô điện
-
Chiếc máy tính mạnh nhất thế giới
-
Trí tuệ nhân tạo giúp nhận diện diễn viên phim 18+
-
Vật liệu nhẹ nhất thế giới, nhẹ hơn cả không khí nay đã có thể in 3D
-
Các nhà khoa học đã phát triển loại pin có thể dùng tới hàng nghìn năm mà không cần cắm sạc!
-
Xe VinFast VF8 không người lái chạy thử nghiệm trên đường phố Việt







-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video