Robot hình người đầu tiên lắp động cơ phản lực
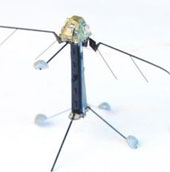
iRonCub3 trang bị động cơ phản lực, nặng 70 kg, sản sinh lực đẩy hơn 1.000 N và nhiệt độ khí xả trên 600 độ C.
Các nhà phát triển robot ở Viện Công nghệ Italy (IIT) giới thiệu khu vực thử nghiệm và kiểm định sơ bộ robot hình người lắp động cơ phản lực đầu tiên trên thế giới, Interesting Engineering hôm 19/8 đưa tin. Mang tên iRonCub, robot này có 4 động cơ phản lực nhỏ gọn, cung cấp cho nó khả năng bay và tiến hành những nhiệm vụ cao cấp. Nhóm nghiên cứu cho rằng khả năng bay sẽ có lợi cho robot ở nhiều ứng dụng bao gồm cứu trợ thiên tai.

Robot iRonCub có thể bay nhờ trang bị 4 động cơ phản lực. (Ảnh: IIT).
Bắt đầu thử nghiệm vào năm 2021, nhóm nghiên cứu ở IIT đối mặt một số thách thức như ngăn robot bắt lửa hoặc thậm chí phát nổ do khí thải từ động cơ. Họ phát triển các nguyên mẫu của iRonCub, chế tạo dựa trên nền tảng iCub v2.5 và v3.0 platforms. iCub là robot hình người phục vụ nghiên cứu do IIT tạo ra, được thiết kế để giúp phát triển và thử nghiệm thuật toán AI.
iCub có thể xoay tự do 53 độ, có lớp da bao phủ toàn thân, cảm biến lực/mômen xoắn, camera, microphone, con quay hồi chuyển, gia tốc kế và thiết bị mã hóa ở mỗi khớp. Với iRonCub, cả hai phiên bản đều sở hữu 4 động cơ phản lực, 2 ở cánh tay và 2 ở balô phản lực gắn liền với lưng robot. Thử nghiệm hiện nay tập trung vào iRonCub phiên bản 3. Nhóm nghiên cứu tiến hành nhiều cải tiến quan trọng với thiết kế phần cứng của iCub để trang bị động cơ ngoài như tạo ra cột sống bằng titan và bổ sung lớp bảo vệ chịu nhiệt. iRonCub3 nặng khoảng 70 kg. Turbine sản sinh lực đẩy tối đa hơn 1.000 N và nhiệt độ khí thải trên 600 độ C.
Các nhà nghiên cứu hiện nay thử nghiệm iRonCub3 trong khu vực bay và điều khiển, đánh dấu bước tiến quan trọng so với iRonCub2. iRonCub3 có một số nâng cấp so với bản tiền nhiệm. Chế tạo dựa trên nền tảng iCub3, phiên bản này bỏ dây chằng và tích hợp cảm biến mômen xoắn vào balô phản lực. Ngoài ra, những thiết bị điện tử mới cũng được thiết kế, trong đó hệ thống điều khiển và hoạch định thế hệ mới hoạt động ở tần số cao hơn. Theo nhóm nghiên cứu, cải tiến giúp tăng cường khả năng và hiệu suất của robot.
Một thách thức chủ chốt đối với robot hình người trên không là lên kế hoạch lộ trình bay và đi lại, bao gồm quá trình chuyển tiếp giữa hai hoạt động. Một thuật toán lên kế hoạch lộ trình dựa trên động lượng được phát triển ở Python, sử dụng phương pháp bắn nhiều lần để giải quyết vấn đề. Thuật toán này đã được kiểm nghiệm qua mô phỏng và sẽ sớm chạy thử trên robot thật.
Đối với kiểm soát bay, thuật toán được thiết kế để quản lý hướng và vị trí của robot, áp dụng tối ưu hóa có điều kiện. Theo nhóm nghiên cứu, cơ cấu có thể điều chỉnh theo nhiều số lượng turbine phản lực. Họ cho biết dự án có độ phức tạp vượt xa robot hình người truyền thống. Nhiệt động lực học đóng vai trò thiết yếu với khí xả từ turbine nóng tới hàng trăm độ C và nhanh gần bằng vận tốc âm thanh. Khí động lực học của hệ thống nhiều phần đòi hỏi mạng lưới neuron để đánh giá theo thời gian thực.
Công nghệ
-
Tại sao con chip lại là một trong những thứ khó sản xuất thế thế giới?
-

Vùng "nghĩa địa đen" bí ẩn và đáng sợ hơn tam giác Bermuda
-

Lý do Tần Thủy Hoàng không trả lương bổng cao vẫn khiến quân lính "bán mạng" vì mình
-

Mũ của binh lính xưa luôn có phần đỉnh nhọn, chuyên gia: Công dụng quả thực rất thần kỳ!
-
Đây là lý do vì sao càng lớn ta càng thấy thời gian trôi qua nhanh chóng mặt
-

Vừa tìm ra mỏ đất hiếm "trời cho", đủ để thế giới dùng trong 1.000 năm: Nước nào may mắn sở hữu?











-

Khám phá khoa học
-

Sinh vật học
-

Khảo cổ học
-

Đại dương học
-

Thế giới động vật
-

Khoa học vũ trụ
-

Danh nhân thế giới
-

Ngày tận thế
-

1001 bí ẩn
-

Chinh phục sao Hỏa
-

Kỳ quan thế giới
-

Người ngoài hành tinh - UFO
-

Trắc nghiệm Khoa học
-

Khoa học quân sự
-

Lịch sử
-

Tại sao
-

Địa danh nổi tiếng
-

Hỏi đáp Khoa học
-

Công nghệ mới
-

Khoa học máy tính
-

Phát minh khoa học
-

AI - Trí tuệ nhân tạo
-

Y học - Sức khỏe
-

Môi trường
-

Bệnh Ung thư
-

Ứng dụng khoa học
-

Câu chuyện khoa học
-

Công trình khoa học
-

Sự kiện Khoa học
-

Thư viện ảnh
-

Video

